
turtlebot_arm, no motion plan found error
 I m trying to use turtlebot_arm package for ROS hydro.
it runs perfect with setting start and end state in rviz workspace
but when i run the pick and place code it gives me this error...
I m trying to use turtlebot_arm package for ROS hydro.
it runs perfect with setting start and end state in rviz workspace
but when i run the pick and place code it gives me this error...
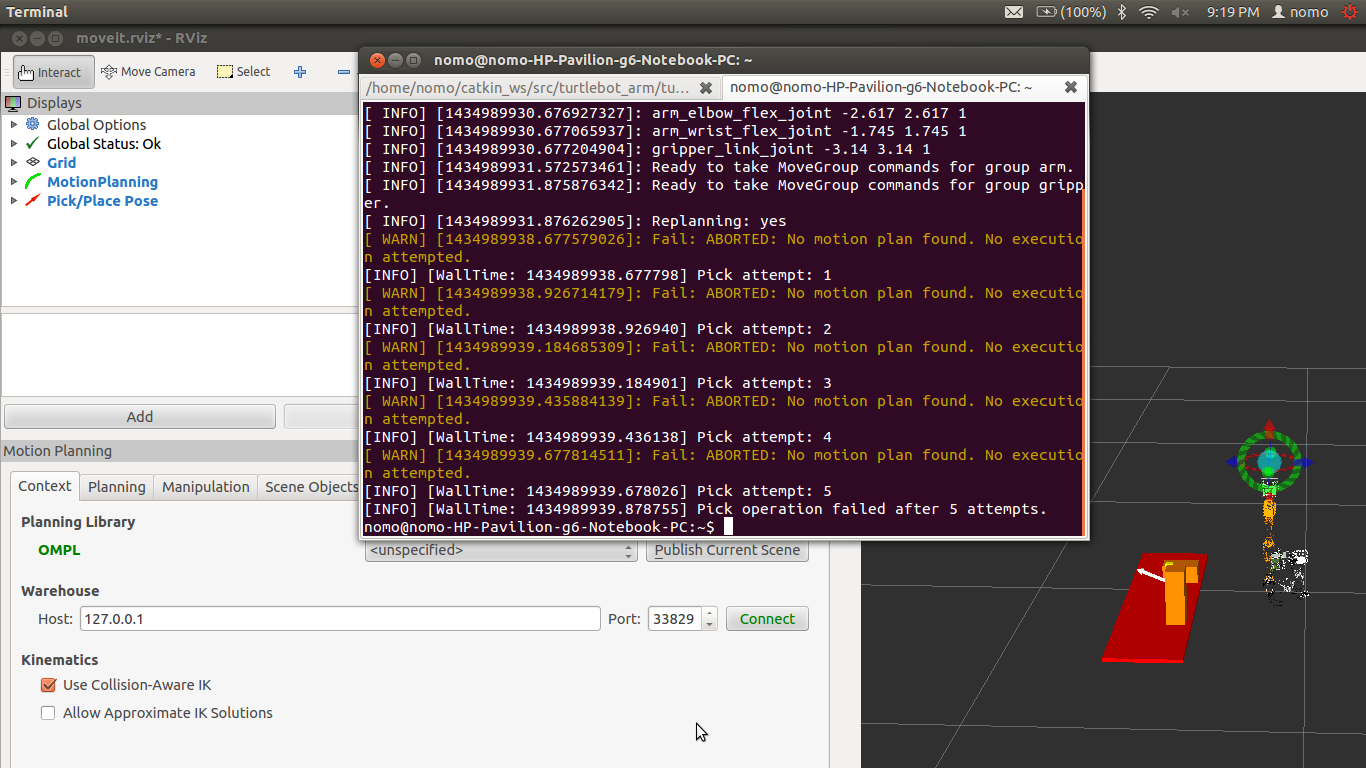
"[ WARN] [1433588765.336846927]: Fail: ABORTED: No motion plan found. No execution attempted."
i have searching over the internet but couldnt find any solution to this issue i even tried on indigo but same problem occurs..
add a comment

