
How to make laser data visible on all Fixed Frames in RVIZ?
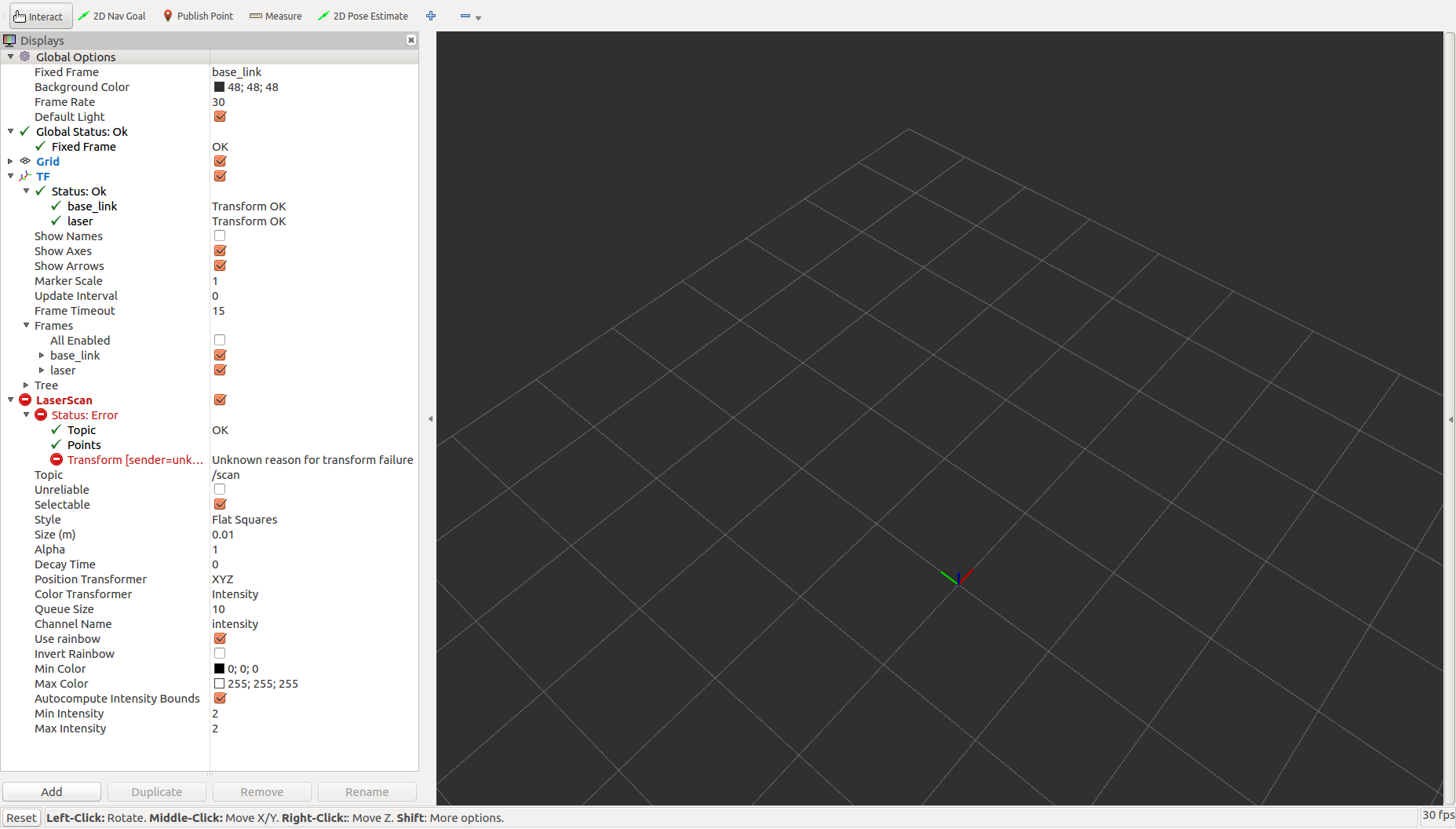
I have problem with ydlidar laser visualization in RVIZ. I am using rosdistro: kinetic on Raspberry Pi 3+ as main computer (run launcher file) and my laptop (to run RVIZ). In RVIZ I can see laser data in "Fixed Frame -> laser". If I change "Fixed Frame" to "base_link" RVIZ is dropping all messages from /scan (laser) and there is TF error in RVIZ LidarLaserScan status: Transform [sender=unknown_publisher] Unknown reason for transform failure
How I was trying to fix that:
1. ntpdate to synchronise both systems
2. change frequency of TF publisher to 10, 50, 100, 500, 1000 but it did not help.
3. There is no errors in 'roswtf'
I kindly ask for your help to solve that problem.
Running:
Raspberry:
roslaunch linorobot lidar.launch
Laptop:
rosrun rviz rviz /tf_static:=/tf
Systems:
Raspberry Pi 3+, Raspian (launch file), Linux raspberrypi 4.14.79-v7+ #1159 SMP Sun Nov 4 17:50:20 GMT 2018 armv7l GNU/Linux
Laptop, Ubuntu 16.04 (RVIZ), Linux user 4.4.0-81-generic #104-Ubuntu SMP Wed Jun 14 08:17:06 UTC 2017 x86_64 x86_64 x86_64 GNU/Linux
On both systems ROS was installed from source by catkin_make_isolated.
Packeges: ydlidar https://github.com/EAIBOT/ydlidar.git
Ros param:
Raspberry (main):
ROS_ETC_DIR=/opt/ros/kinetic/etc/ros
ROS_ROOT=/opt/ros/kinetic/share/ros
ROS_MASTER_URI=http://10.1.1.225:11311
ROS_VERSION=1
ROS_IP=10.1.1.225
ROS_PACKAGE_PATH=/root/linorobot_ws/src:/opt/ros/kinetic/share
ROSLISP_PACKAGE_DIRECTORIES=/root/linorobot_ws/devel/share/common-lisp
ROS_DISTRO=kinetic
Laptop (RVIZ):
ROS_ROOT=/opt/ros/kinetic/share/ros
ROS_PACKAGE_PATH=/home/user/linorobot_ws/src:/opt/ros/kinetic/share
ROS_MASTER_URI=http://10.1.1.225:11311
ROS_VERSION=1
ROSLISP_PACKAGE_DIRECTORIES=/home/user/linorobot_ws/devel/share/common-lisp
ROS_DISTRO=kinetic
ROS_IP=10.1.1.40
ROS_ETC_DIR=/opt/ros/kinetic/etc/ros
Ogre.log
rviz -l
[ INFO] [1548349571.364933383]: rviz version 1.12.16
[ INFO] [1548349571.365039107]: compiled against Qt version 5.5.1
[ INFO] [1548349571.365060586]: compiled against OGRE version 1.9.0 (Ghadamon)
Launch file:
<node pkg="tf" type="static_transform_publisher" name="base_link_to_laser"
args="0 0 0 0 0 0 /base_link /laser 100" />
<node name="ydlidar_node" pkg="ydlidar" type="ydlidar_node" output="screen">
<param name="port" type="string" value="/dev/linolidar"/>
<param name="baudrate" type="int" value="230400"/>
<param name="frame_id" type="string" value="laser"/>
<param name="angle_fixed" type="bool" value="true"/>
<param name="low_exposure" type="bool" value="false"/>
<param name="heartbeat" type="bool" value="false"/>
<param name="resolution_fixed" type="bool" value="true"/>
<param name="angle_min" type="double" value="-180" />
<param name="angle_max" type="double" value="180" />
<param name="range_min" type="double" value="0.08" />
<param name="range_max" type="double" value="16.0" />
<param name="ignore_array" type="string" value="" />
<param name="samp_rate" type="int" value="11"/>
<param name="frequency" type="double" value="12"/>
</node>
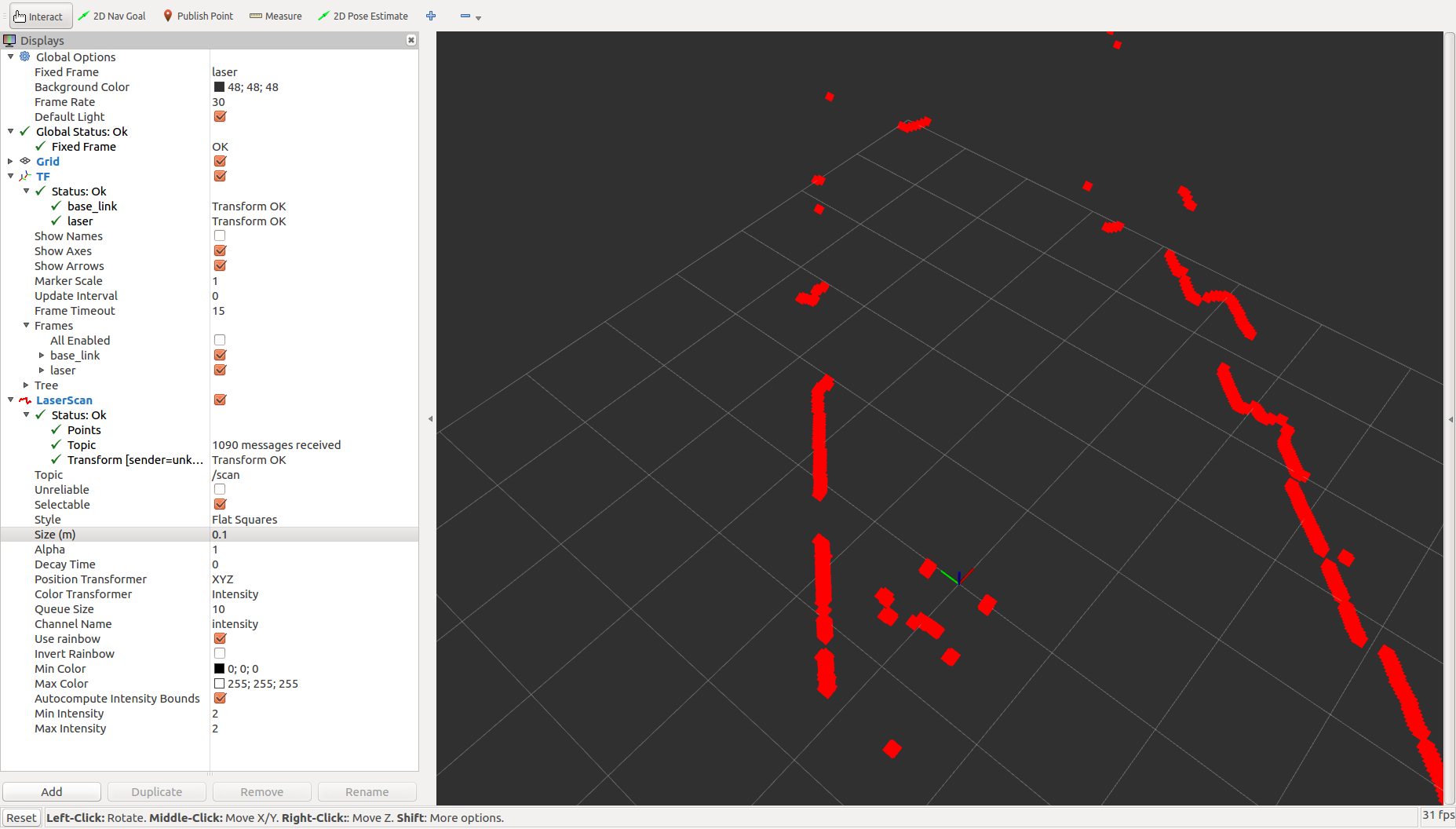
Screens:
RVIZ /laser frame:
RVIZ /base_link frame:
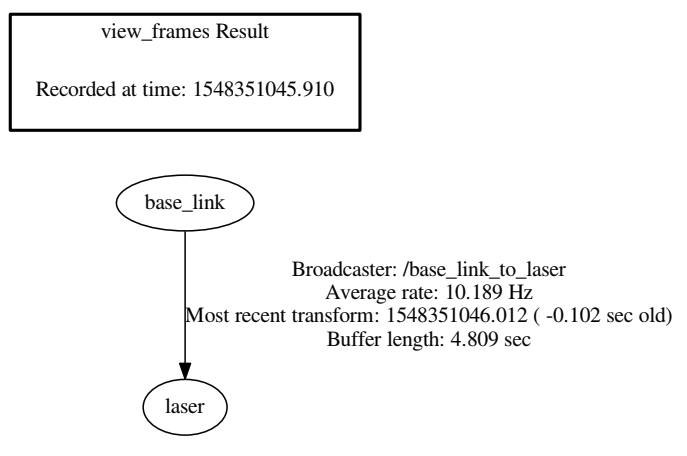
TF tree:

Can you please attach your screenshots and tf tree to this post? I've given you sufficient karma for that.
Nobody can help? Or at least tell what could be wrong?
Why do you do this: