
How can I modify the Laser angle scan?
I have an RPLidar and from its documentation, the laser can do 360 degrees. The thing is, I do not need full 360 degrees as some area will constantly block the laser sensors. So basically, I only need 180 degrees of front of the laser scan.
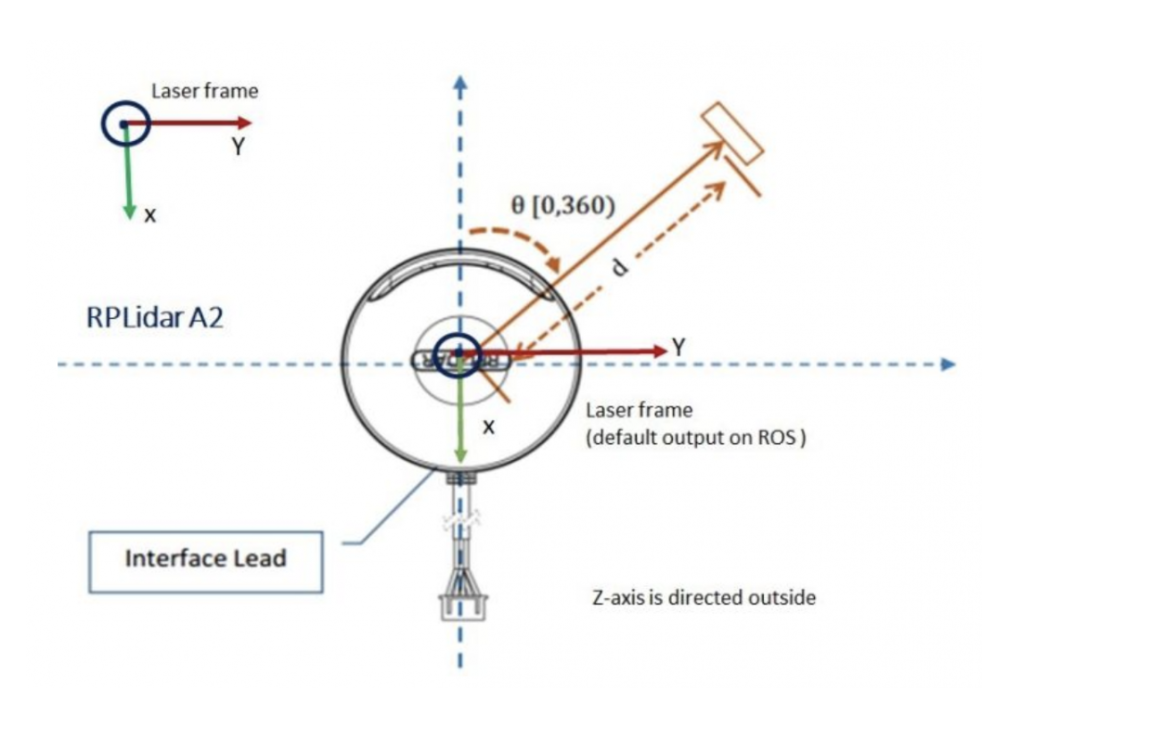
How can I modify it? Here is the RPLidar's angle information:
And from the source code, it uses the LaserScan sensorCallback function:
So if I put angle_min = 270, angle_max = 180, will it do the job? (I will put in Radiance, as it is required from the documentation).
add a comment

