
Acceleration profile Overshoots
Hi I am using ROS kinetic with Ubuntu 16.04. I am trying to compare the trajectory generated by MoveIt! and the trajectory at the output of ros-control. When I analyzed the acceleration profiles for both, there were huge jerks and overshoots at the ros-control side. Below is the acceleration profile:
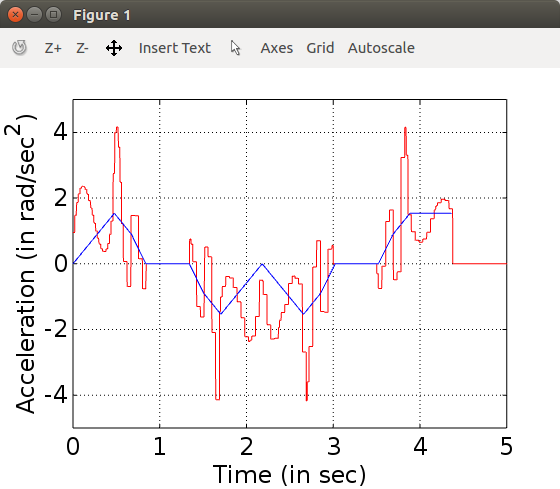
I moved only joint 2 of my 7 dof manipulator arm and taken the ros-control output from /position_joint_trajectory_command topic.
The blue one is the acceleration output from MoveIt! and the red one is the acceleration output from ros-control. I am using position_controllers/JointTrajectoryController for moving the manipulator.
Can someone tell how to smooth this profile ??

This seems very similar to https://answers.ros.org/question/3105... . Are you both working on the same project or homework assignment?