
Moveit Gazebo Integration for trajectory execution of panda robot
Hello,
I want to view the trajectory generated by moveit in gazebo.
I have done motion planning using moveit c++ interface and i'm observing the robot movement in Rviz. The code moveit c++ interface is here.
Here are the controllersfrom gazebo side
Here are the controllers from moveit side
controller manager file is here
My questions are as follows[answered below]:-
What kind of controllers are necessary to observe the trajectory generated by moveit in gazebo? Can anybody give some example??
I know that moveit c++ interface communicates with Rviz by using some ROS topics/ Actions? How can i find over which topic/action moveit c++ interface communicates with rviz so that i can use it same ROS topic/action to communicate with Gazebo.
Updated questions:
- When i launch moveit_planning_execution file i get the error saying Action client not connected: /joint_trajectory_action
Below is the snapshot of the error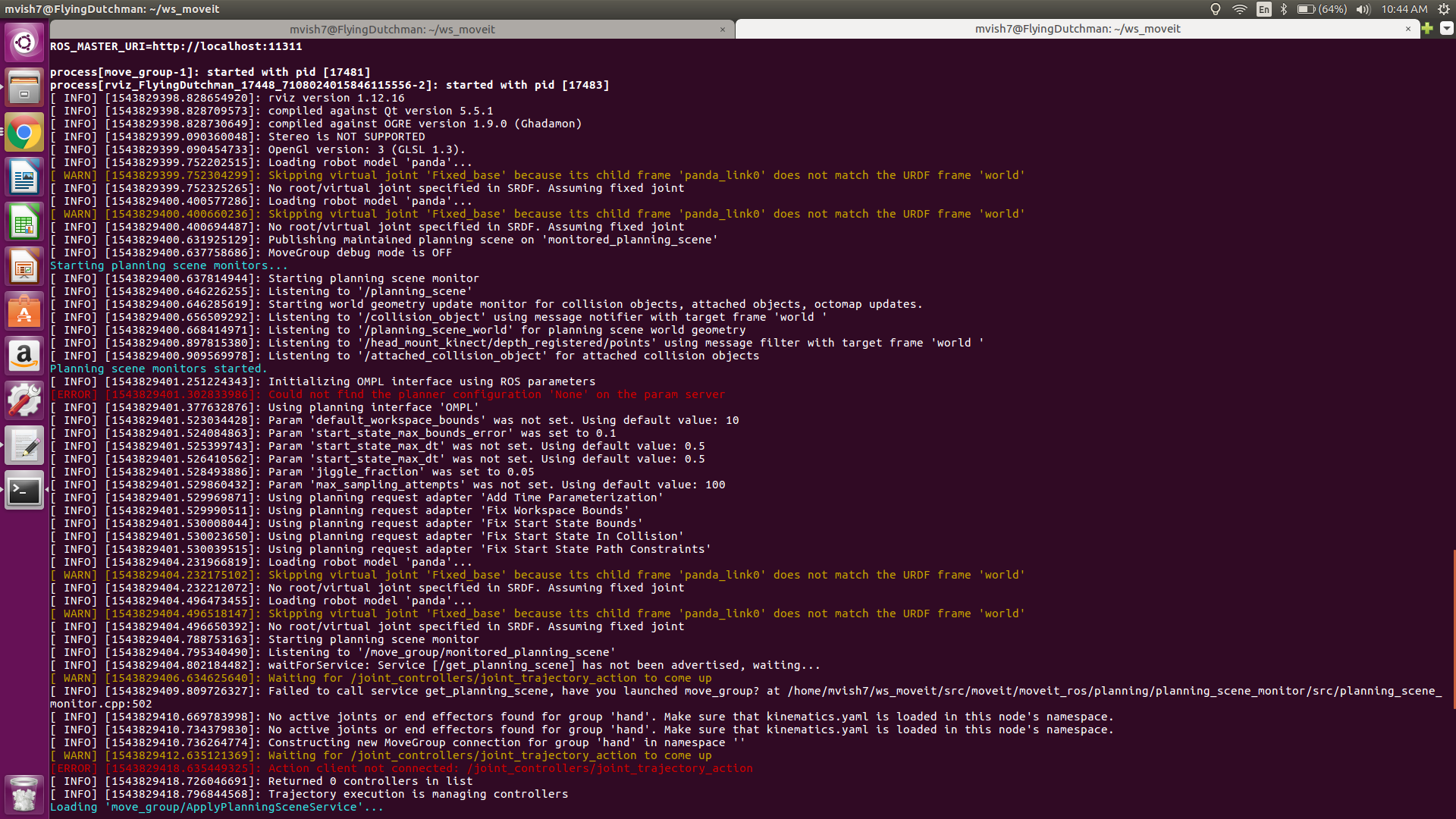
can anybody help in this?? Any kind of help is appreciated.
