
No transform from [base_link] to frame [map] [closed]
Followed this TF ROS tutorial
Incurred error: 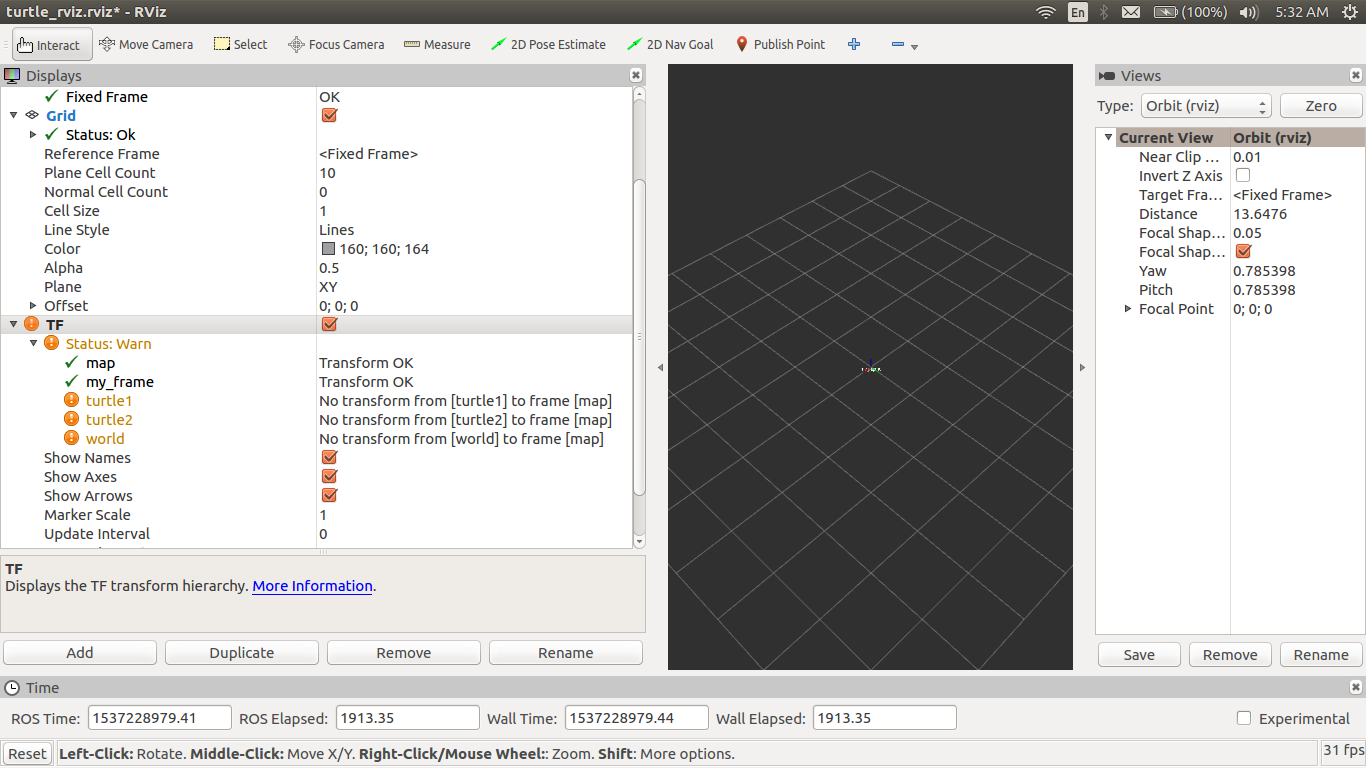
TF status is 'warn'. This reads three error messages:
- No transform from [turtle1] to frame [map]
- No transform from [turtle2] to frame [map]
- No transform from [world] to frame [map]
I've tried( one at once ) these commands, viz.,
$ rosrun tf static_transform_publisher 0.0 0.0 0.0 0.0 0.0 0.0 turtle1 turtle2 100
$ rosrun tf static_transform_publisher 0.0 0.0 0 0.0 0.0 0.0 turtle1 turtle2 world
$ rosrun tf static_transform_publisher 0.0 0.0 0 0.0 0.0 0.0 turtle1 turtle2 world 100
to resolve this, while this command is running on one of the terminals
$ rosrun tf static_transform_publisher 0.0 0.0 0.0 0.0 0.0 0.0 map my_frame 100
I've also followed #q10762, but didn't help in this case.
What am I missing in here? Please correct and clarify. Any constructive discussions or leads will be much appreciated. Thanks in advance.

Your image is not visible, please attach it directly to your question. I've given you enough karma for that.
I've added the image you posted to your duplicate here.
No need to post a new question.
Can you please attach the image from section "4.2 Using rqt_tf_tree" of the tutorial.