
obstacles ignored when drawing costmap
Hi all.
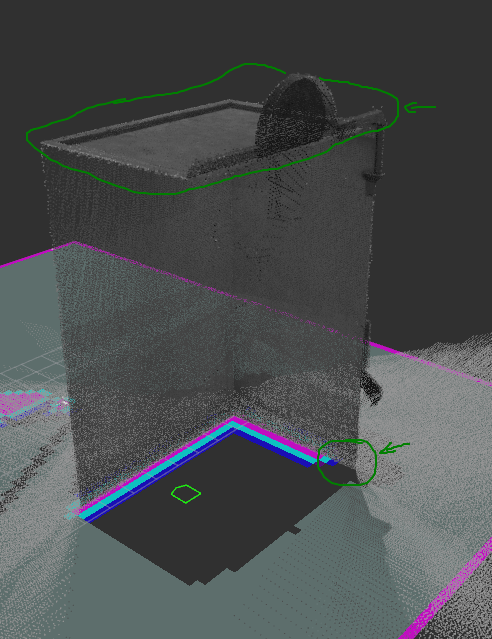
I'm having trouble with the costmap in ROS. I'm using the obstacles costmap layer for updating my global costmap. However, some obstacles are ignored by my costmap. Points above the default 2m are never added as an obstacle. However, I did set the max_obstacle_height parameter to 60m. In the documentation it says "Setting this parameter to a value greater than the global max_obstacle_height parameter has no effect". I'm wondering what they mean with the global max_obstacle_height, since I can't find any documentation on a global max_obstacle_height. I did however add a max_obstacle_height parameter under "costmap" (next to the one in my obstacles layer), to no avail. This is not the only problem though, as sometimes even lower points are ignored, but only at very specific places. I added a picture to demonstrate the problem. There, the roof should be added as an obstacle on the costmap, but it doesn't happen (the building is ~10m high). The bottom corner also isn't added as an obstacle, even though it is well below the 2m.
Anyone who knows what could be the problem here?
Note: The point cloud is built up gradually. My UAV starts at the back of the building (left-ish in the picture). Only after a short period it moves beyond one of the corners, and adds the point cloud of the wall that is now visible. The first part is added perfectly, but the last part of the wall isn't. Also when I rotate my building, the same thing happens (the last part of the wall isn't added). I also think that the higher obstacles are even marking the costmap as "clear", instead of "unkown" - the exact opposite of what I need it to do.
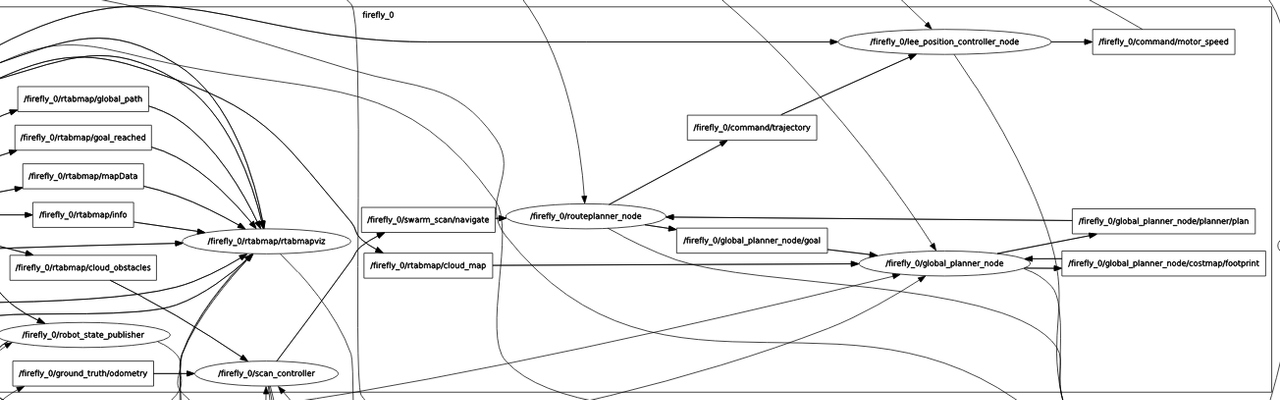
Edit: It might be useful to add that I'm not using the full move_base package, but only the global_planner. I added the rqt_graph as well.
My costmap parameters (output of "rosparam get /firefly_0/global_planner_node/"):
costmap:
always_send_full_costmap: true
footprint:
- [-0.325, -0.325]
- [-0.325, 0.325]
- [0.325, 0.325]
- [0.46, 0.0]
- [0.325, -0.325]
global_frame: /map
height: 35
inflation_radius: 1
max_obstacle_height: 60.0
obstacles:
base_scan: {clearing: true, data_type: PointCloud2, inf_is_valid: true, marking: true,
max_obstacle_height: 60.0, min_obstacle_height: 0.2, obstacle_range: 9.0, raytrace_range: 10.0,
topic: rtabmap/cloud_map}
observation_sources: base_scan
transform_tolerance: 0.3
origin_x: -17
origin_y: -17
plugins:
- {name: obstacles, type: 'costmap_2d::ObstacleLayer'}
- {name: inflation, type: 'costmap_2d::InflationLayer'}
publish_frequency: 1.0
resolution: 0.3
robot_base_frame: /firefly_0/base_link
track_unknown_space: true
update_frequency: 5.0
width: 35


Having raytrace range greater than obstacle_range doesn't make sense, secondly I think it's because of your lidar setting, as obstacle information comes from lidar points, if lidar doesn't see roof as an obstacle, it won't show up on costmap.
I thought I'd read somewhere that the raytrace_range should be greater than obstacle_range, so that every obstacle which is added can also be cleared afterwards. The default values for these parameters also reflect that.
The obstacle information here comes from my point cloud. The map subscribes to rtabmap/cloud_map, which is the same point cloud which is displayed in the image.
that's computationally expensive and not very useful in most of the cases. Secondly if it is missing a corner or something, it simply means that lidar didn't see it. What is Orientation of lidar on UAV?
Is there a better approach to construct a global costmap then? In the end, it will always need the point cloud, no? And the sensor can certainly see it, since it constructed the point cloud in the first place. (It's not a lidar but a vi-sensor - but that shouldn't matter too much I think)
Yes, it needs pointcloud, source doesn't really matte. What is your end gaol with this?
The goal is to autonomously construct a cloud map. All of the logic seems to be working. The only thing lacking now is a well constructed costmap (so my UAV knows it cannot fly through the building).
I have tried cartographer and it works pretty well, maybe you can look into this as well or octomap.