
Why are obstacles added at the edges of the global costmap when GlobalPlanner is used?

I recently run into the following problem. It looks like while using global_planner/GlobalPlanner as global planner whenever I give a goal, obstacles in form of lines are formed at the edges of the global costmap. Since I am using rolling_window: true, the line-shape obstacles are created when the costmaps move together with the robot.
This is a weird issue since the planner shouldn't be creating obstacles at all at any point. I could not reproduce this problem using different global planner (like carrot, navfn) and is not connected to the local planner as well (tried out eband, pose_follower and base_local_planner). I also tried disabling all costmap related plugins except the obstacles_layer but the lines are still created when the global_planner is used.
My initial guess is that there is something wrong with the costmap update when the costmap moves for one resolution step but I cannot understand how is this connected with the global_planner? Maybe it somehow messes with the costmap update so whenever the costmap moves the new values are updated with lethal cost or it is connected with my costmap configuration files (which I doubt since it works fine with other planners). I also tried tinkering with the global costmap update/publish frequency and resolution but the obstacles still appear. Changing the update/publish frequency though clears the obstacles but does not stop the creation of new ones.
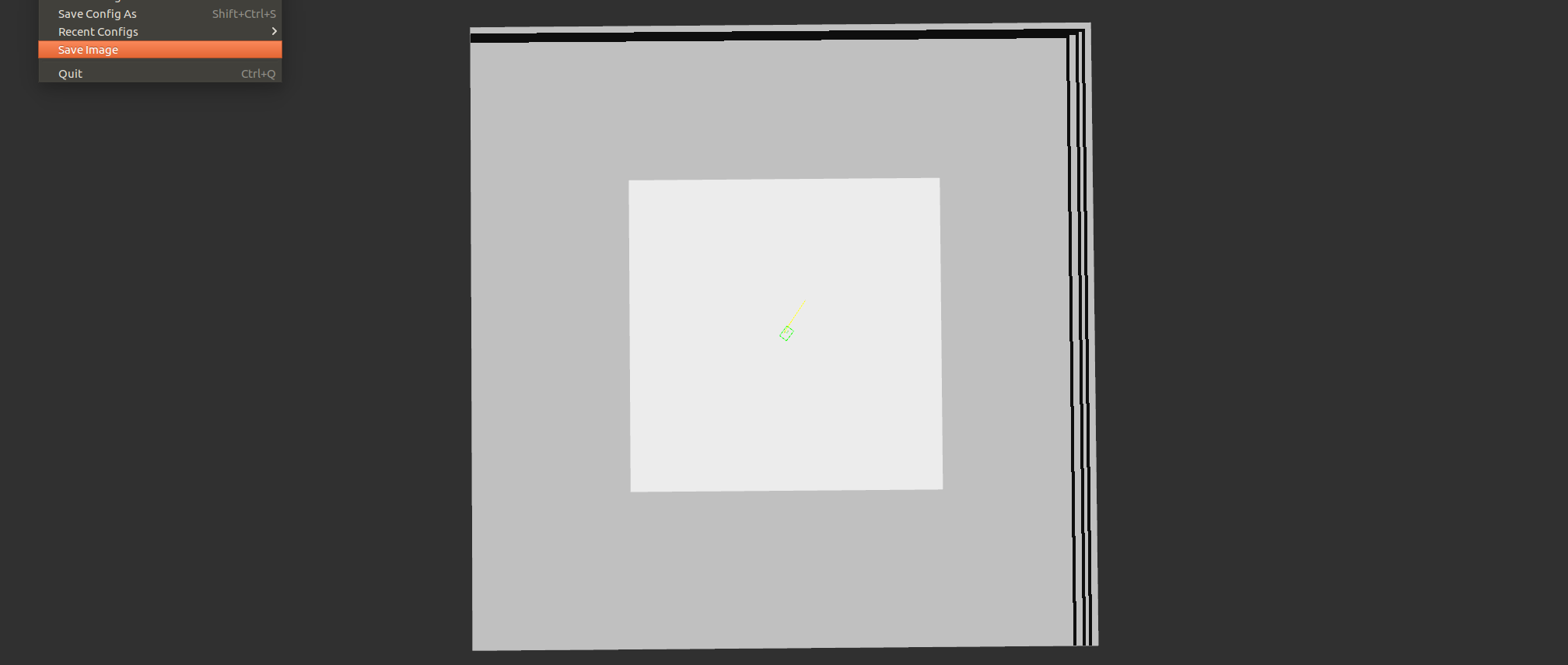
Has anyone run into this problem? You can see the obstacles on the image and the bellow:
EDIT:
Also tried it with jackal_navigation and the same problem still occurs.

