
Which parameters of the IMU should be used for navigation?
Hi,
I want to do navigation with my mobile robot. For this, I am using bno055 IMU. I obtained 9 dof parameters on ROS with ımu/data topic like the image. 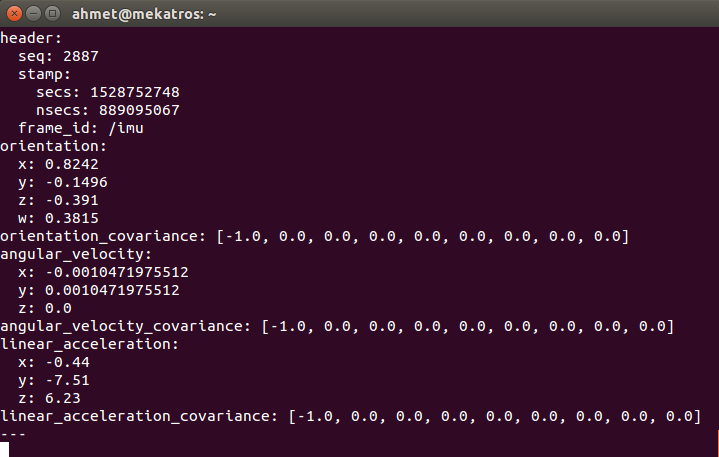 . What do I have to do to localize the robot after that? When I do a little research I need to do ekf_localization, but I do not know how to do it. Could you please explain clearly?
. What do I have to do to localize the robot after that? When I do a little research I need to do ekf_localization, but I do not know how to do it. Could you please explain clearly?

Do you have any idea??