
Can I modify portion of the global plan in TrajectoryPlannerROS?

Hi there,
I would like to know if it is possible to change the length of the "portion of the global plan that the local planner is currently attempting to follow" as stated in the wiki for the published topic.
The wiki says for goal_distance_bias parameter: "The weighting for how much the controller should attempt to reach its local goal". I assume the local goal is the end of the portion of the local plan, is that correct?
I want to use the TrajectoryPlannerROS plugin in move_base to follow a global path, but the robot tends to drive towards walls and get stuck, when driving around corners. I think I could improve the performance if I the portion of the global plan was shorter, because the robot would not try to take shortcuts that lead into walls. Basically I want the robot to follow the path more closely, however I don't want to increase the path_distance_bias because higher path_distance_bias means the robot can't avoid obstacles on the path then. I'm not sure what impact the local path length has to navigation, but I think it's worth trying.
So can I somehow influence the length of the current portion of the path? If it's possible how would I do this? Of course I surely can get the source code and make a new planner, but I don't want to this if it can be avoided.
Thanks in advance for anything that might help me improve the local planner behavior.
UPDATE1: Perhaps I could improve the behavior of the local planner by changing some other parameters, but I can't get it to work reliably. The footprint matches the actual robot plus some extra space for movement of the kinect and some padding. I don't think further increasing the footprint will help me.
I tried different settings for the local costmap, but it did not help either. When I use high cost values around the obstacles the robot has problems going through doors.
The idea behind my idea was , that it seems pretty useless scoring a local trajectory by "heading towards goal" if the goal is in a different room. I have an image of rviz:
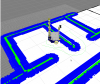 As you can see, the robot is heading toward the wall, where the goal is behind. If I could dynamically change the length of the plan portion, I could perhaps make the planner head towards the door. Though I'm not sure if this really works.
I noticed I can improve the planner's behavior by increasing the sim_time parameter (to about 10 sec), but it does not work in every situation.
As you can see, the robot is heading toward the wall, where the goal is behind. If I could dynamically change the length of the plan portion, I could perhaps make the planner head towards the door. Though I'm not sure if this really works.
I noticed I can improve the planner's behavior by increasing the sim_time parameter (to about 10 sec), but it does not work in every situation.
Here is a parameter dump of the relevant parameters:
TrajectoryPlannerROS: {acc_lim_th: 1, acc_lim_theta: 1.0, acc_lim_x: 1.0, acc_lim_y: 0.0,
angular_sim_granularity: 0.025, controller_frequency: 20, dwa: true, escape_reset_dist: 0.1,
escape_reset_theta: 1.57079632679, escape_vel: -0.1, gdist_scale: 0.8, global_frame_id: odom,
goal_distance_bias: 0.8, heading_soring: false, holonomic_robot: false, latch_xy_goal_tolerance: true, max_rotational_vel: 0.3,
max_vel_theta: 1.0 ...
