
Costmap shows free space as obstacles

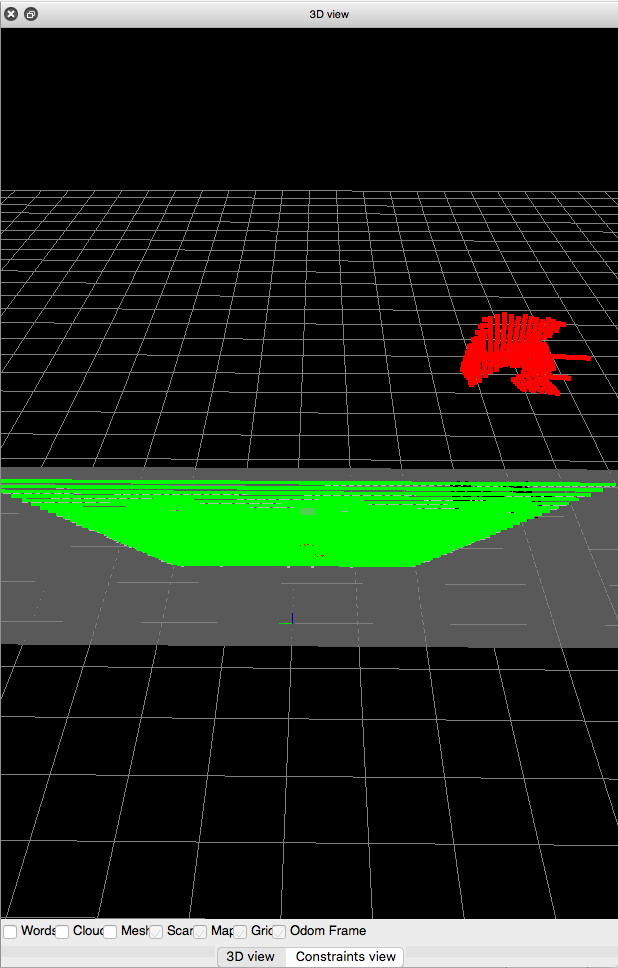
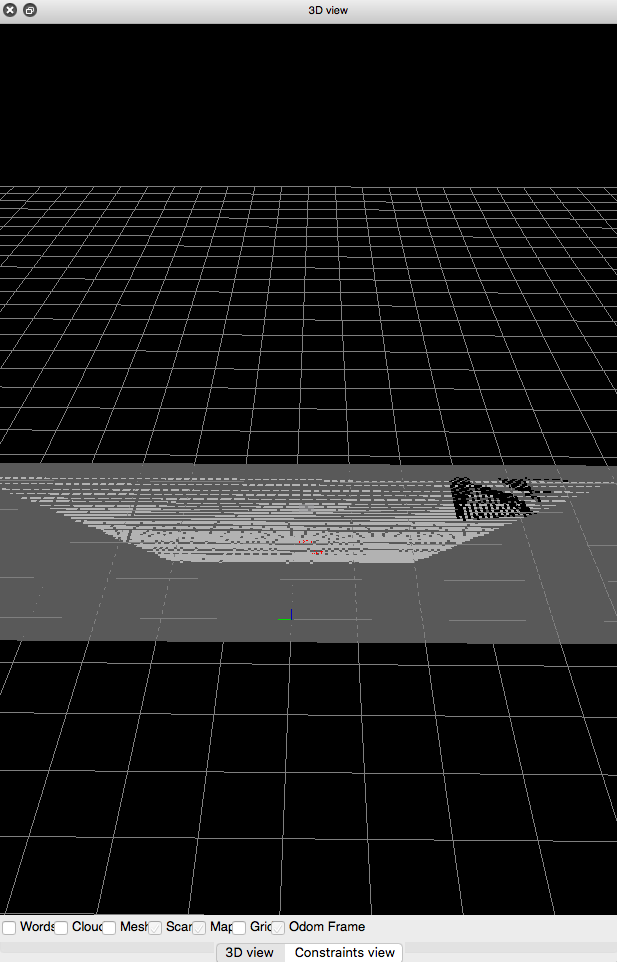
Hi everyone! I am trying to use navigation stack on quadcopter equipped with kinect sensor at Gazebo simulation. I am using grid_map topic of rtabmap_ros package as map for navigation of UAV which hovers at 1.5 m over ground. But global_costmap and local_costmap both show free space on proj_map as obstacles (proj_map, global_costmap). How can I fix it?
Costmap common params:
footprint: [[-0.2,-0.2],[-0.2,0.2], [0.2, 0.2], [0.2,-0.2]]
inflation_radius: 0.65
cost_scaling_factor: 10.0
obstacle_layer:
obstacle_range: 5.5
raytrace_range: 6.0
max_obstacle_height: 0.7
track_unknown_space: true
observation_sources: point_cloud_sensor
point_cloud_sensor: {
sensor_frame: quad/camera__link,
data_type: PointCloud2,
topic: /quad/camera_/depth/points,
marking: true,
clearing: true
}
Global costmap params:
global_costmap:
global_frame: /map
robot_base_frame: /base_link
update_frequency: 1.0
publish_frequency: 1.0
static_map: false
plugins:
- {name: obstacle_layer, type: "costmap_2d::ObstacleLayer"}
Local costmap params:
local_costmap:
global_frame: /map
robot_base_frame: /base_link
update_frequency: 5.0
publish_frequency: 2.0
static_map: false
rolling_window: true
width: 5.0
height: 5.0
resolution: 0.02
tranform_tolerance: 0.5
planner_frequency: 1.0
planner_patiente: 5.0
plugins:
- {name: obstacle_layer, type: "costmap_2d::ObstacleLayer"}

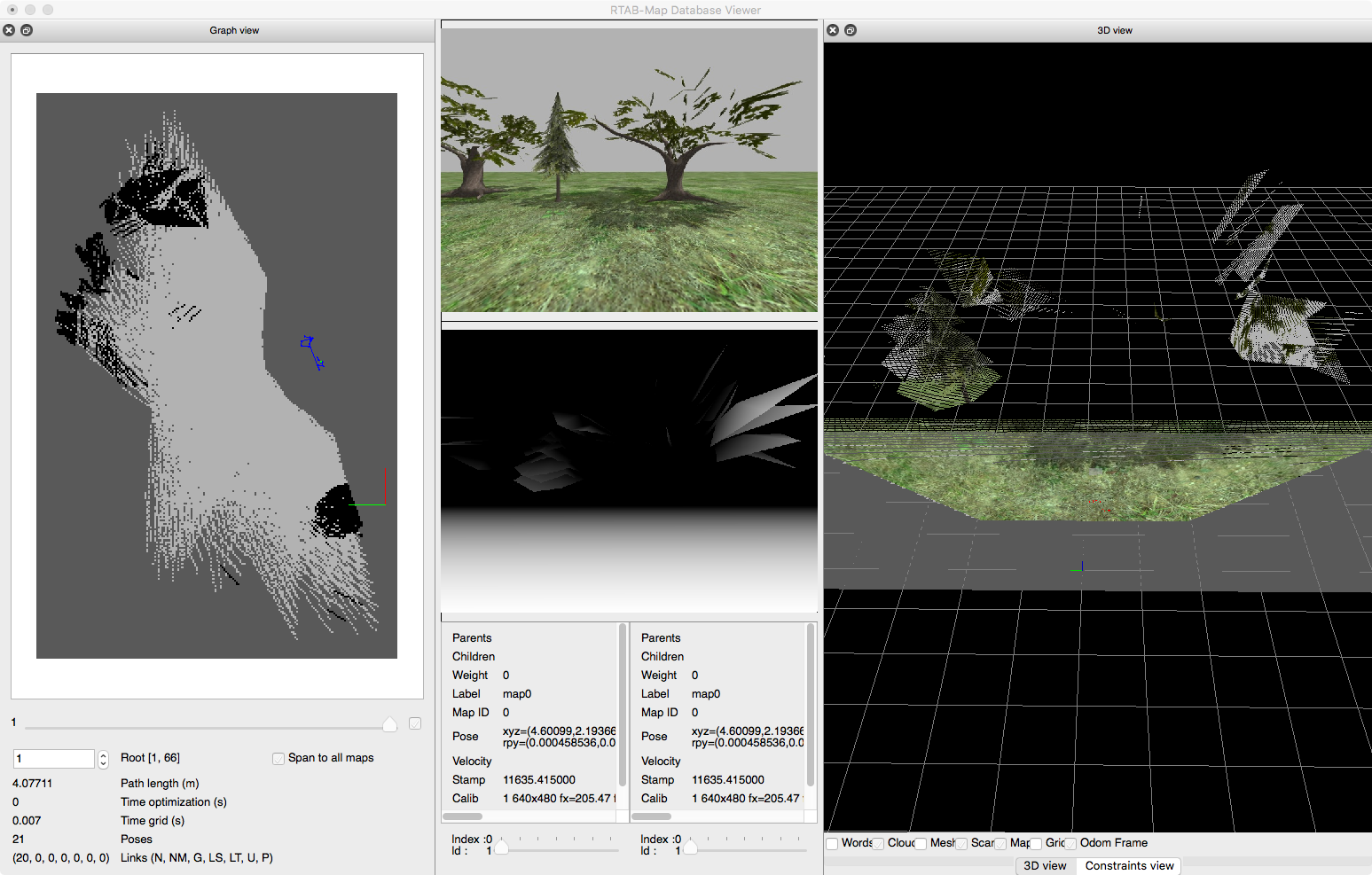

Can you show a screenshot of the Gazebo environment? Can you share the
rtabmap.dbtoo?Sure. Screenshot of the Gazebo environment, rtabmap.db