
Error in Planning group with MoveIt! Setup Assistant


Hey!
I had successfully created a working URDF file for the UR5 robot with a Kinect sensor attached to the end-effector. I have verified the URDF file using check_urdf. I wished to use the URDF file with Gazebo as well as RViz, for which I was following this link). I am using ROS Kinetic with Ubuntu 16.04.
For creation of the MoveIt! configuration package, I was referring to MoveIt setup assistant tutorial, this tutorial and the ROS Industial tutorial.
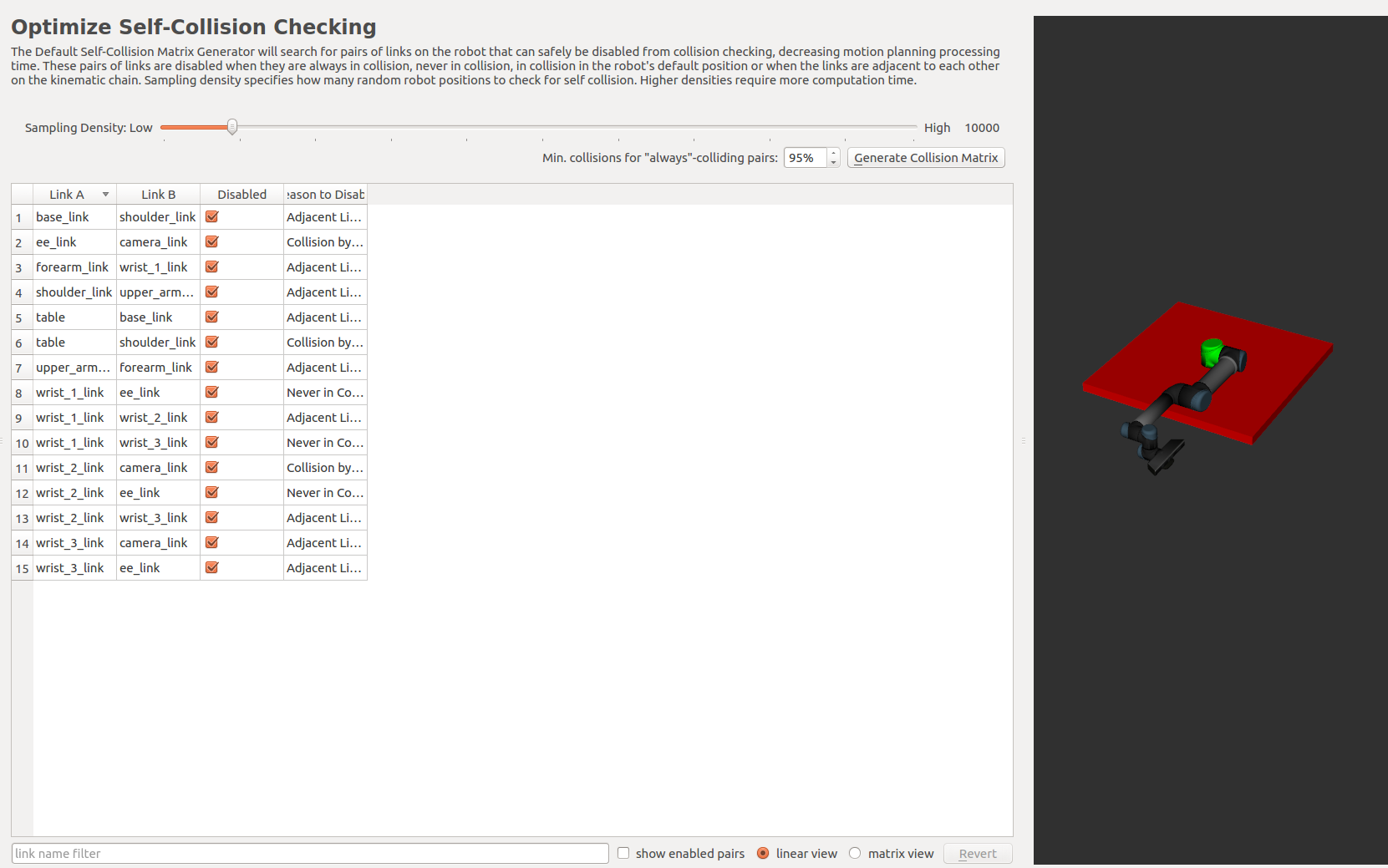
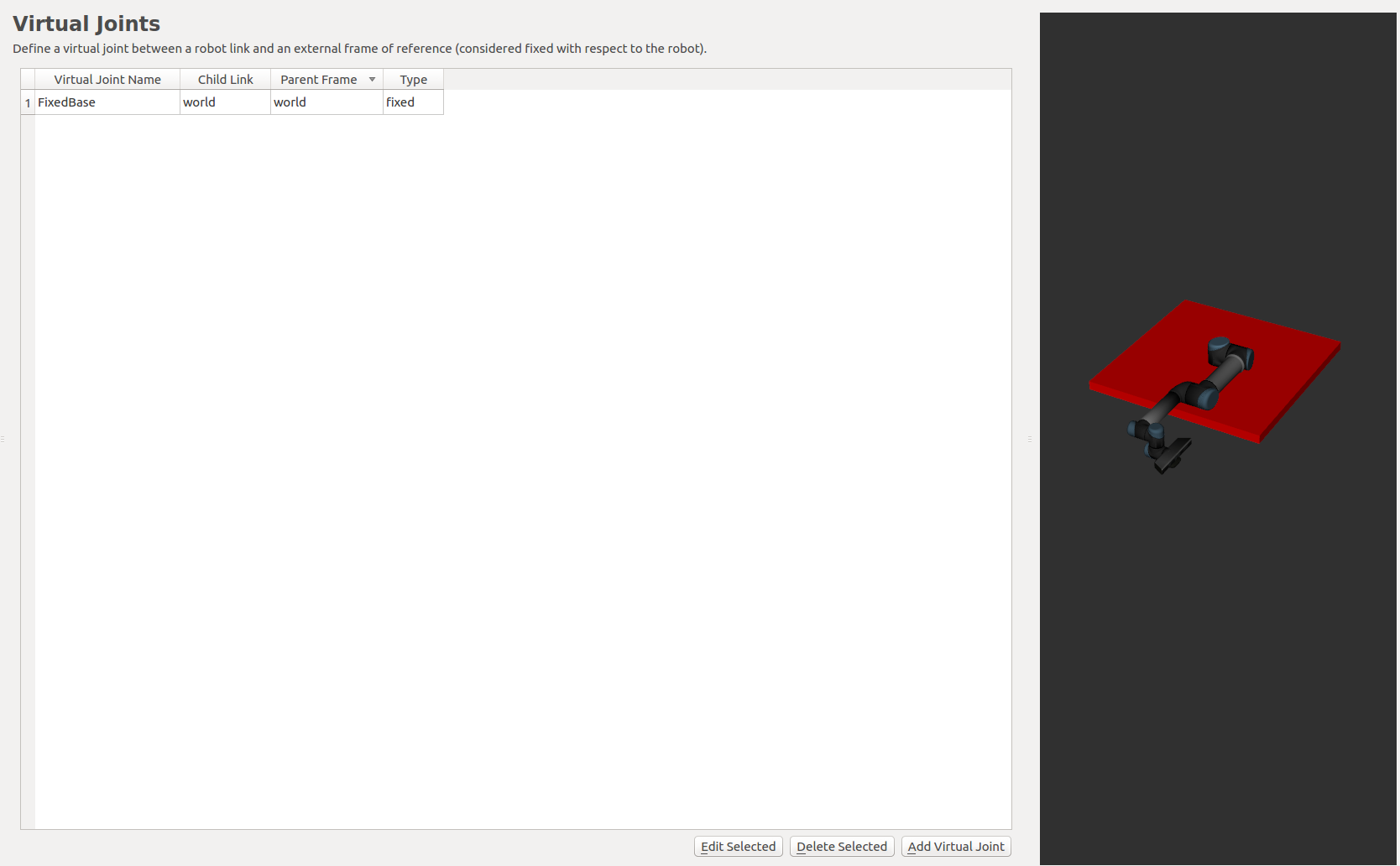
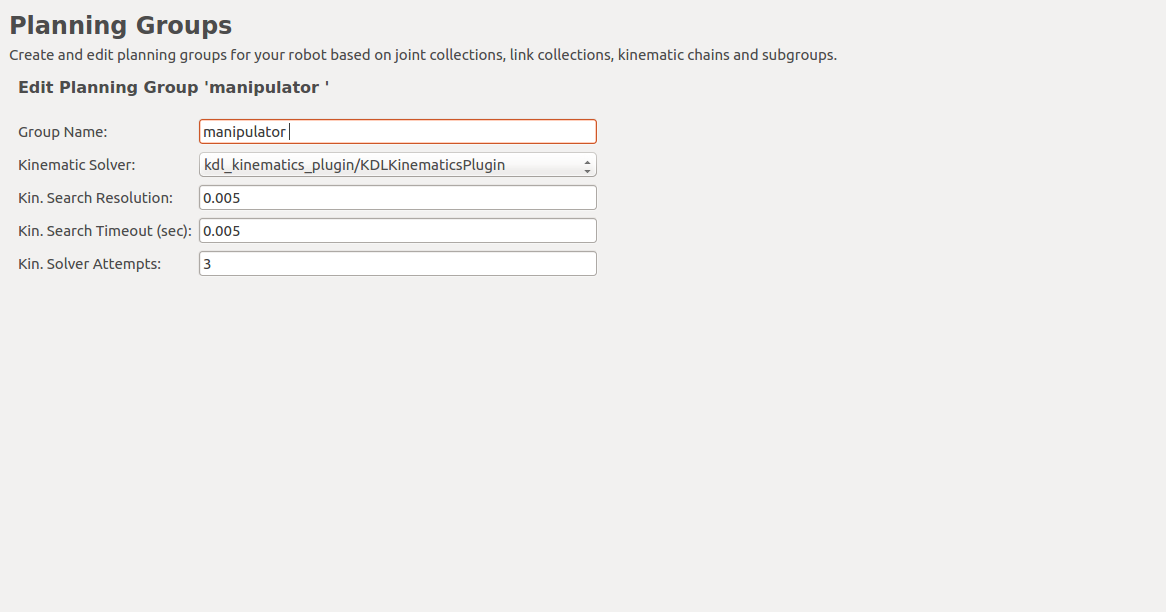
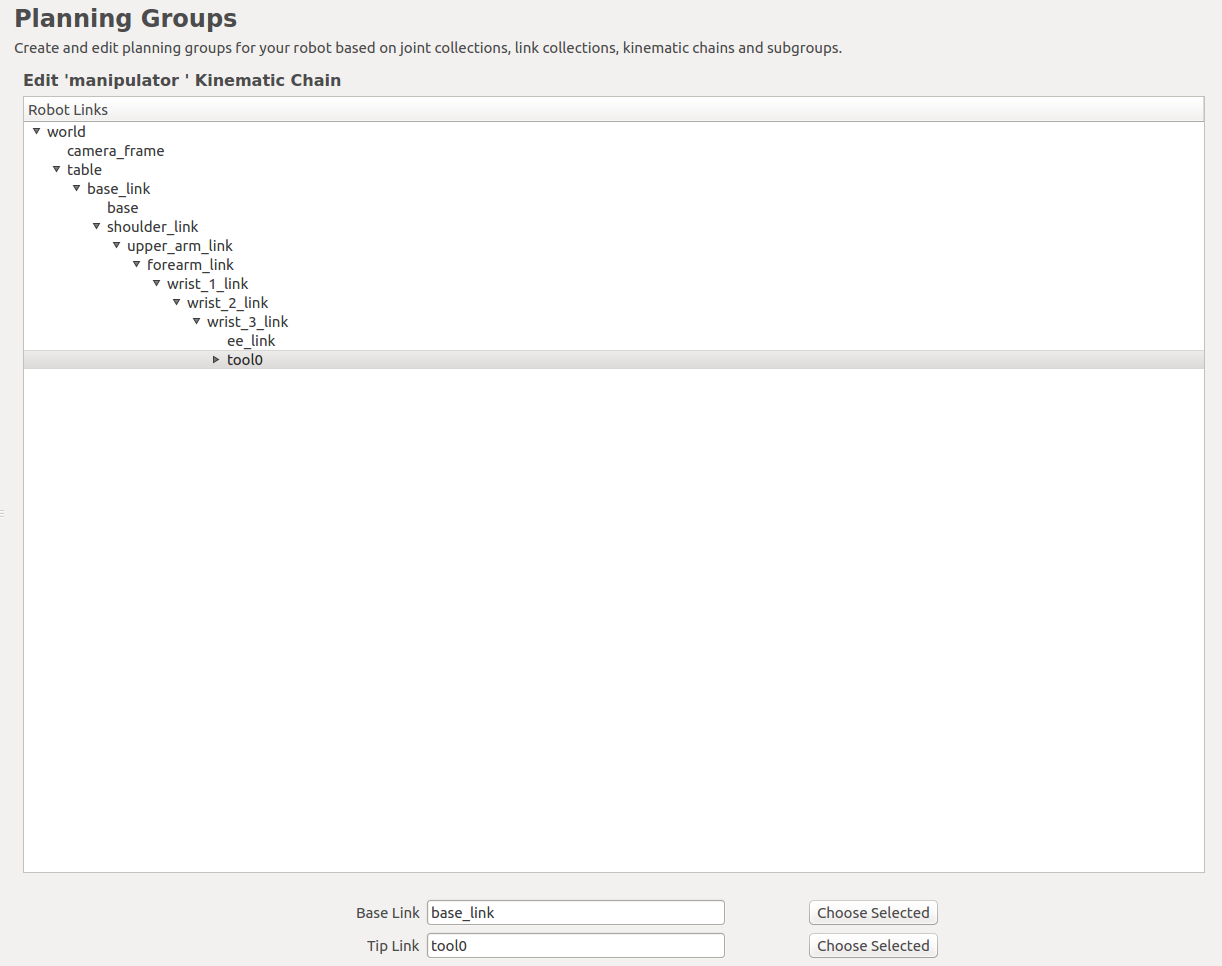
I have created the self-collision matrix and the virtual joints as per the ROS-I tutorial. The ROS-I suggested that I add the planning group with the name 'manipulator' and by adding a Kinematic chain from the base_link to the tool0 (end-effector) link. However when I try to add robot poses with this planning group, I get this following error message.
Unable to find joint model group for group: manipulator Are you sure this group has associated joints/links?
Because of this, I was not able to visualise the joint motions as well as set a pose. Any particular reason for this error? I have attached the related pictures for reference. Thanks in advance.
Edit: I have checked the same procedure with standard URDF files from the UR5 and UR10 robot. I am still getting the same error.
Update: Added the link to the URDF file
