RViz error:Transform [sender=unknown_publisher] - For frame [X]: Frame [X] does not exist
[ROS Kinetic, Ubuntu 16.04]
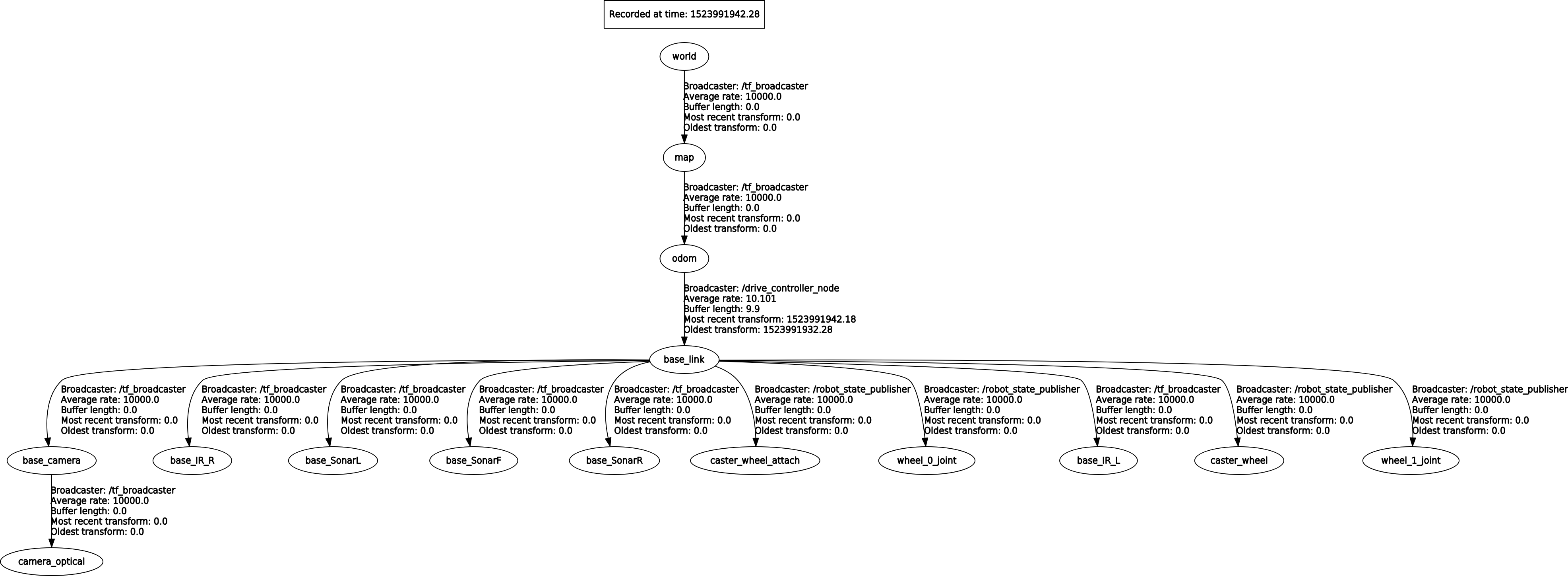
Hello, I have a problem with sensor frames in rviz. I have created a static trasform broadcaster that publishes all static transforms of my robot (did it according to http://wiki.ros.org/tf2/Tutorials ). Map->odom tf is created temporarily as static, until I integrate some SLAM module. Now map and odom coordinate systems are placed in the same position. Odom->base link is published by ros_controllers node. The tf tree looks as follows:
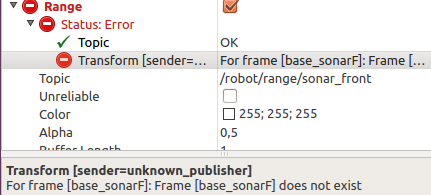
However when I start a visualization in rviz I can't see any sensor_msgs::Range data (from any of my 3 sonars) but I can choose corresponding topics. Rviz shows error (example, shows similar for other sonars):
"Transform [sender=unknown_publisher] - For frame [base_sonarF]: Frame [base_sonarF] does not exist".
I am really confused as you can see on the tf_tree that the system recognizes transforms I'm publishing. Is it rviz error or I did something wrong? In my URDF file I didn't create any joints for sonars, only for wheels and base, if that matters. When I'm echoing sonar topics everything seems to be right, especially distances from obstacles.
I've found same issue in other questions but none of the solutions worked (like adding marker in rviz, making sonar's frame a fixed frame).
Thanks in advance.