
Not able to visualize Octomap in RViz

I am publishing an octomap from a .bt file with octomap_server such that:
$ rosrun octomap_server octomap_server_node btFile.bt
But when I try to visualize the octomap in RViz, I am only getting this ¿occupancy base? (see image).
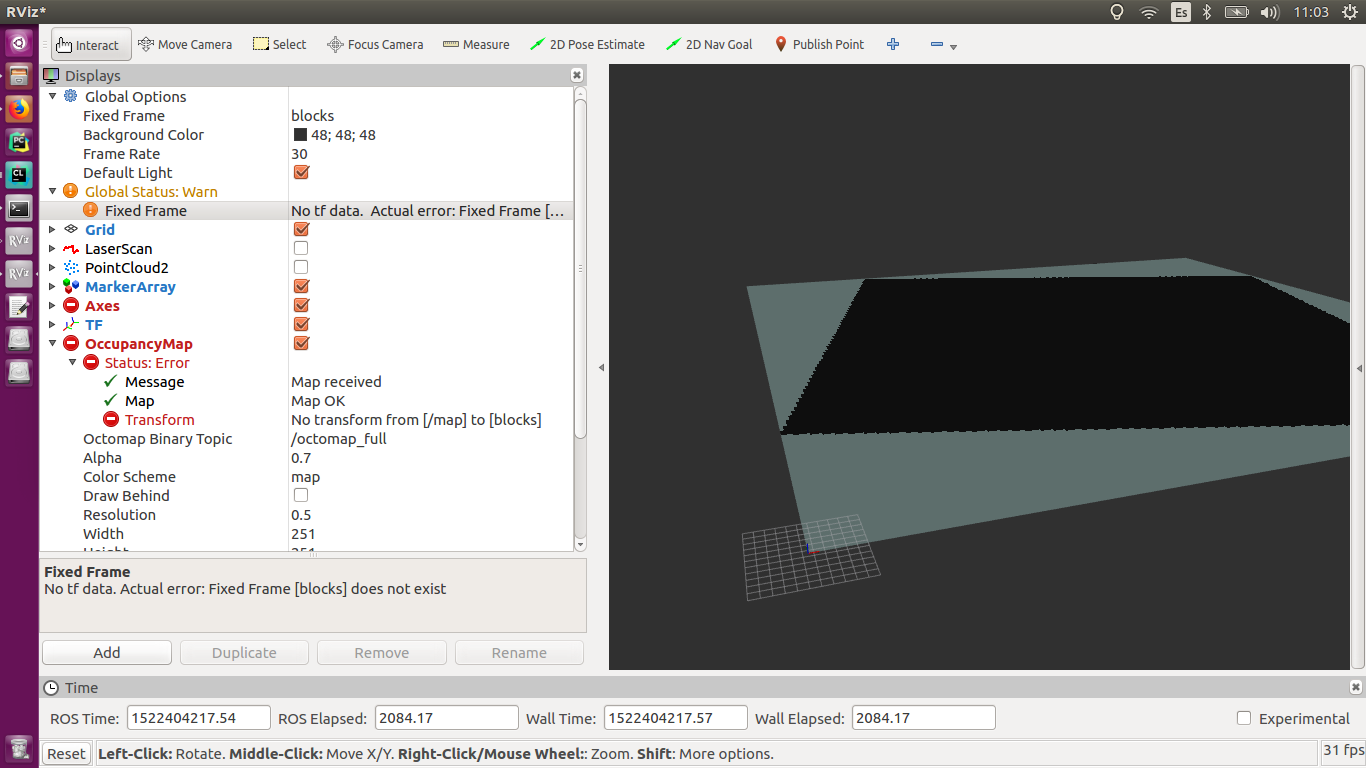
As you see, it is clear that the transform from /map to blocks is not published. Does this need to be there to be able to visualize it? Also, it is saying that the frame blocks does not exist.
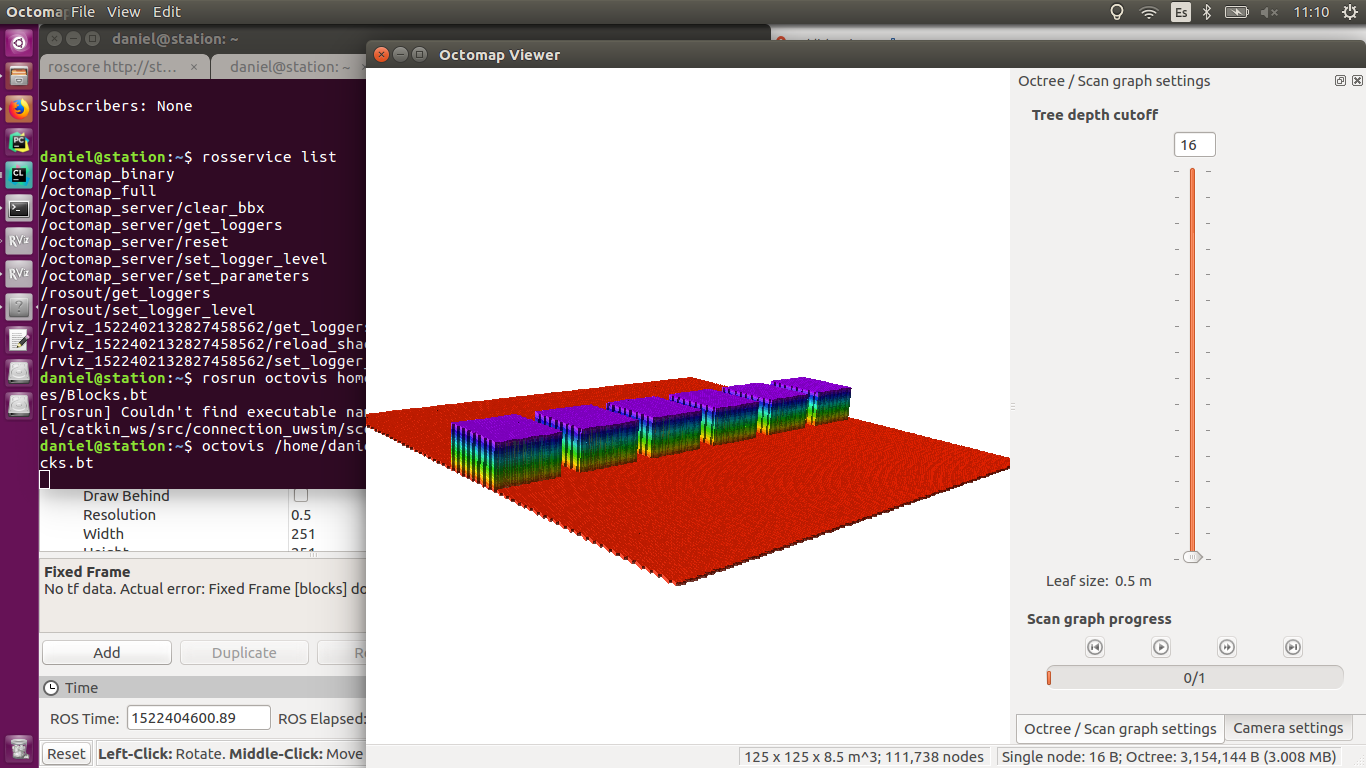
In OCTOVIS, I do not have this problem and the whole octomap is loaded successfully (see image below).
How can I solve this?
add a comment
