
PCD file and octomap file generated by rgblslamv2 have wrong cooedinate
I use rgblslamv2 to generate PCD file and octomap file,but they have wrong coordinates.
For example,I use the kinect to explore environment,it means my view to see the object is in a parallel to the ground,it may should let my environment looks like that:
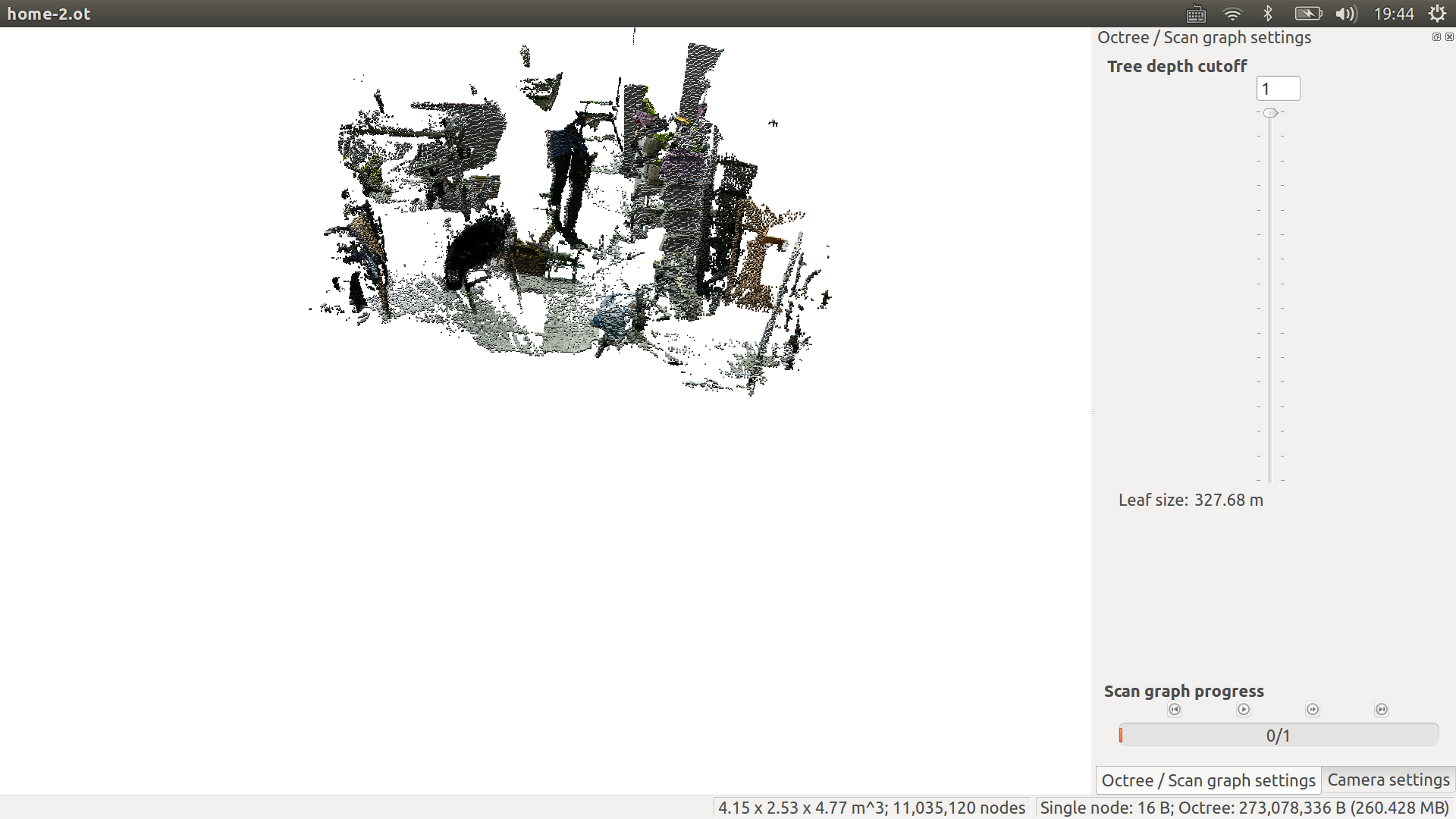
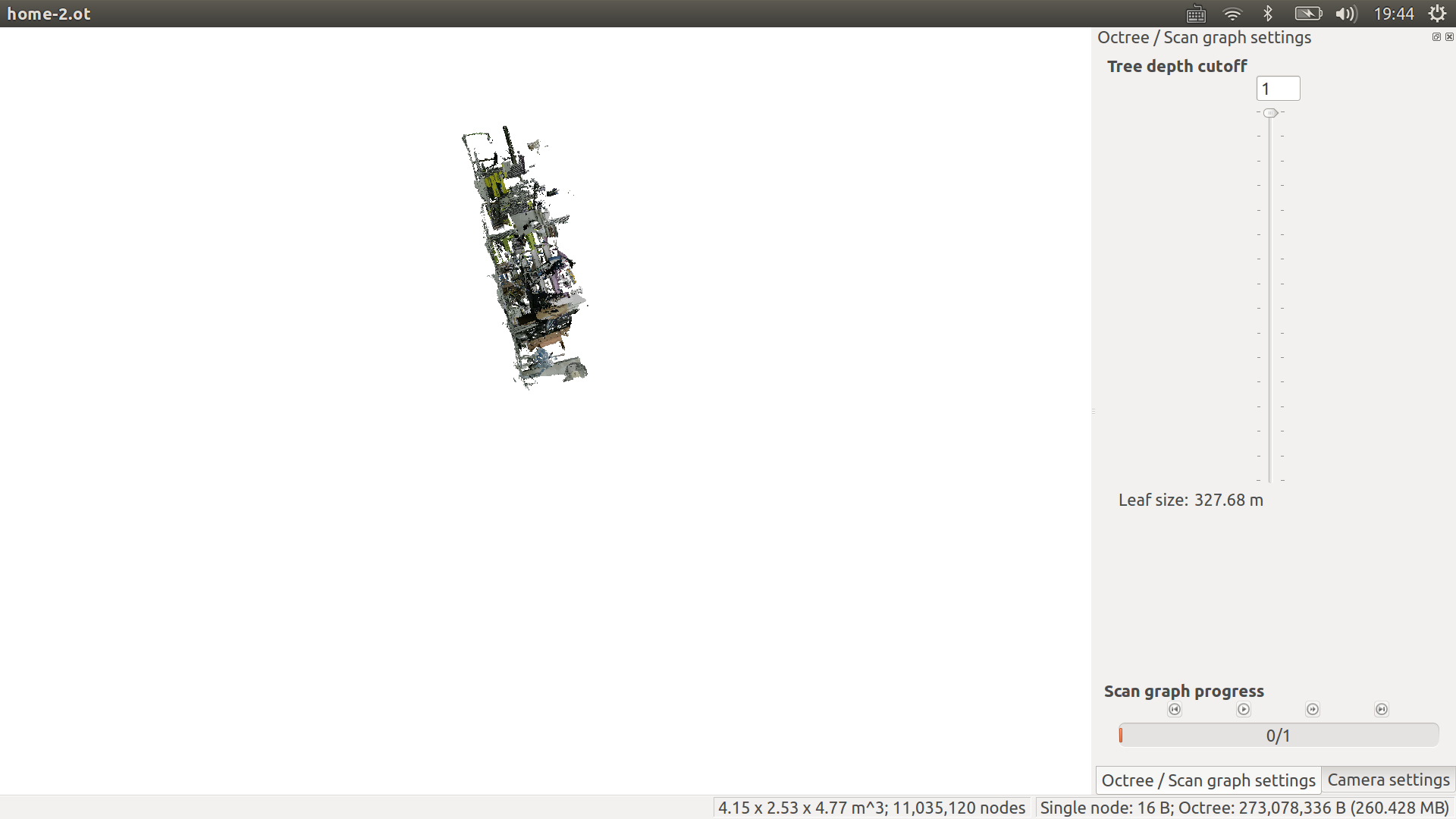
But in the below is what I get: the inital coordinate before I rotate is likely be Vertical to the view I want,and the parameter:4.152.534.77m^3 proofs that I get a wrong coordinate.
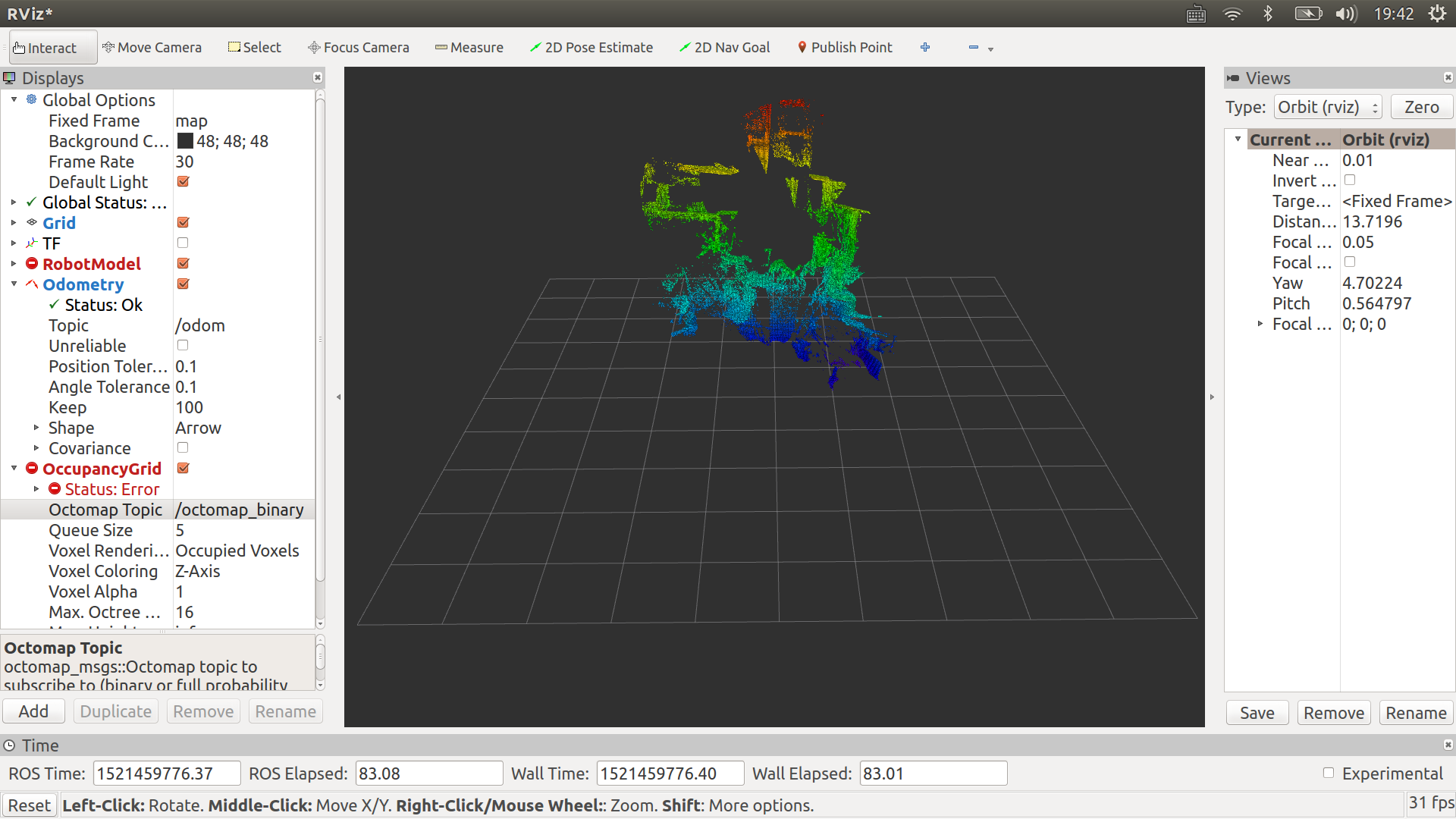
If I want to look it at rviz: yes the ground is vertical.
How can I do to convert the coodinate system? I just feel the coordinate system depends on my first camera frame?If it is true,my camera just walk in a plane... Now I have no idea for that? Do you have any suggestion?
Thanks! I can not add other picture in extra edit... here is my picture's address. https://img3.doubanio.com/view/photo/... The straight direction is repersented the ground, the Parallel direction is the wall. And There are some points misestimated ,So they look like they are projecting below the ground.

{kind=link}
I find I put my camera in a tilted angle,but if I put camera orthogonal to the floor,I get a view that reverse 90 degree to world coordinate,such like my last picture. Is that because my tf transform has problem? please help me ...