
Method for filtering out gps topic in a bag file
Hi everyone,
I have recorded a bag file which contains gps topic for using with robot_localization pkg. I want to modify my gps topic to mimic a scenario where gps signal is not available, e.g transition from indoor to outdoor and vice versa. Using topic tools I was able to drop/filter out my gps messages. The result is in the following picture:

topic_tools drops X out of Y messages regularly as it is supposed to (blue dots). My question is: is there any method that can drop messages for a specific time length? For clarification, I would like something like this:
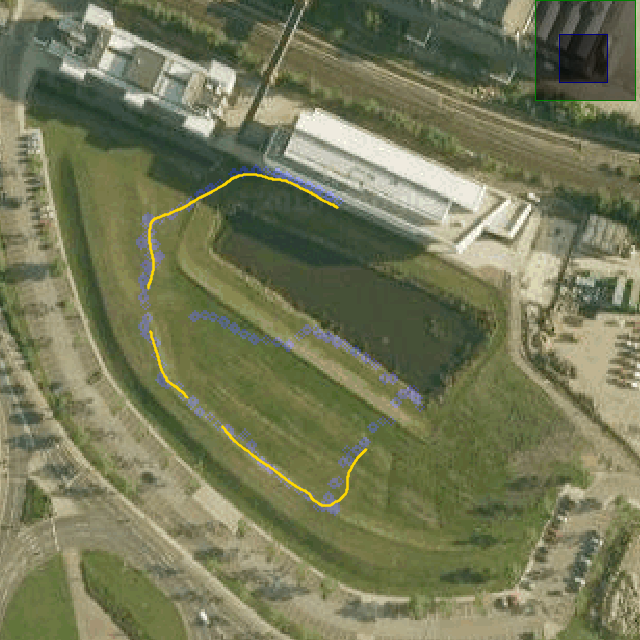
where the yellow lines are my gps messages and the gaps between them are dropped gps messages. I appreciate your help!
add a comment


