You should "play" with a simple urdf to see what's the difference.
It's all about the tf, with the origin tag of the joint you define where is the tf and with the origin of the link you define where your object is according to your tf. Here's an exemple :
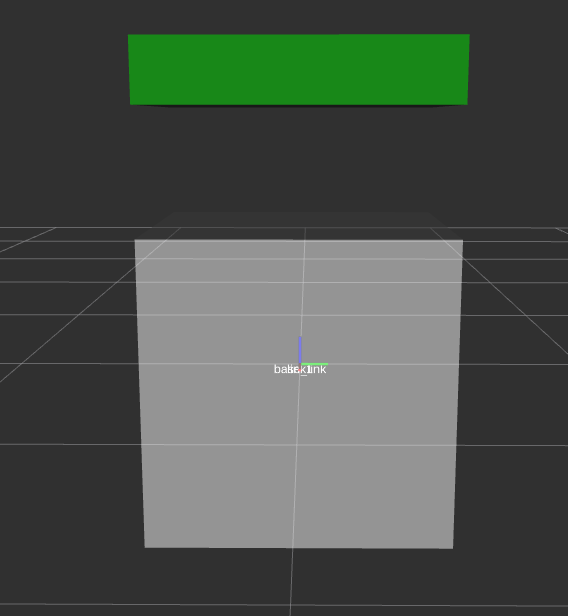
The joint tag origin is 0 0 0 but the origin of the link1 is 0 0 1(and you can see the tfs are at the same position) :
Here I set the joint tag origin to 0 0 1 and the origin of the link1 is 0 0 0 :
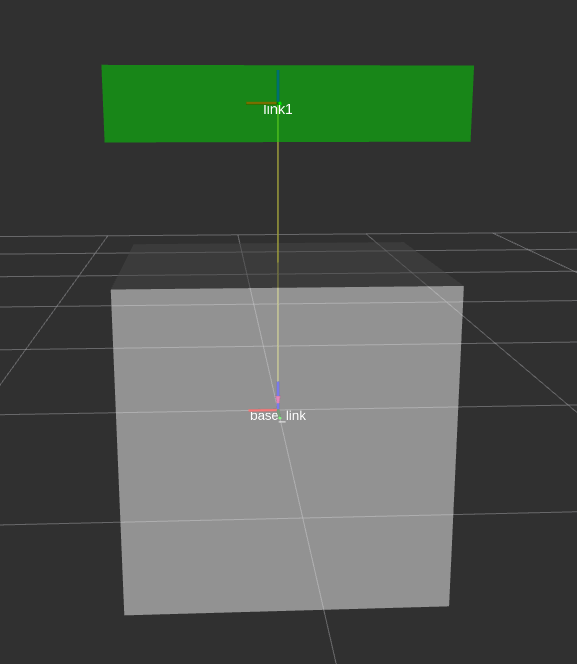
The link1 is at the same position in both case but the tf isn't. It comes in consideration when you have different type joints if you don't correctly define the tfs some rotations or translations could not behave as expected.



