
How to invert coordinate frames of a Transform
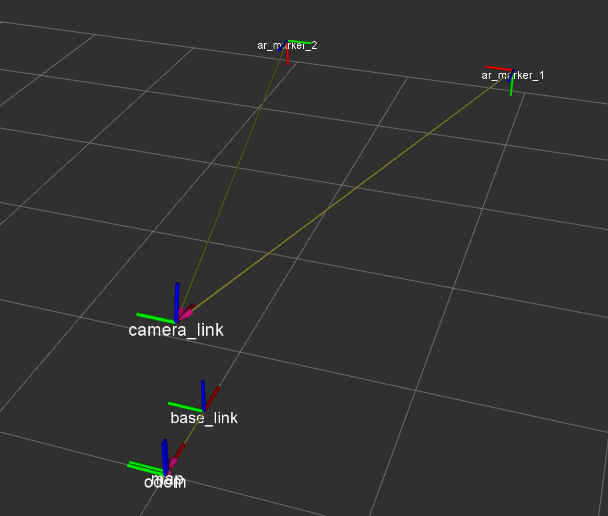
I have a fixed transform coming from the ar_track_alvar pkg, that gives me the markers pose into the camera_link. I want to get the inverse of it and save the exact data but reversed. The problem is that being the marker frame reversed, the inverse gives me wrong result.
How to have x and y markers coordinates to be consistent with the camera_link ones? What is the easiest way to achieve this? I want to have x pointing forward (red) and y on the left (green).
Thanks for anyone helping me out!
Cheers, Simone.

Since you already have a transform from your markers to camera_link, have you tried to apply a rotation with respect to camera_link in your marker's frame?
Hi @tuandl thanks for the comment! Not yet, I do not know the way to code it, I am new to ROS and tf, How would you to that? Can you append here a simple code snippet or code steps I have to take? I appreciate your help!