
Fixing TF between base_link and odom

Hey , i am in the process of porting my robot from simulation to real world .
- Finished URDF (robot_description) , which publishes the tf
- Finished with the most essential stack such as robot_nav , robot_viz , robot_movebase
My Real Robot can now listen to cmd_vel and will responds correctly to it . I have written a script which accepts cmd_vel and publishes odom .
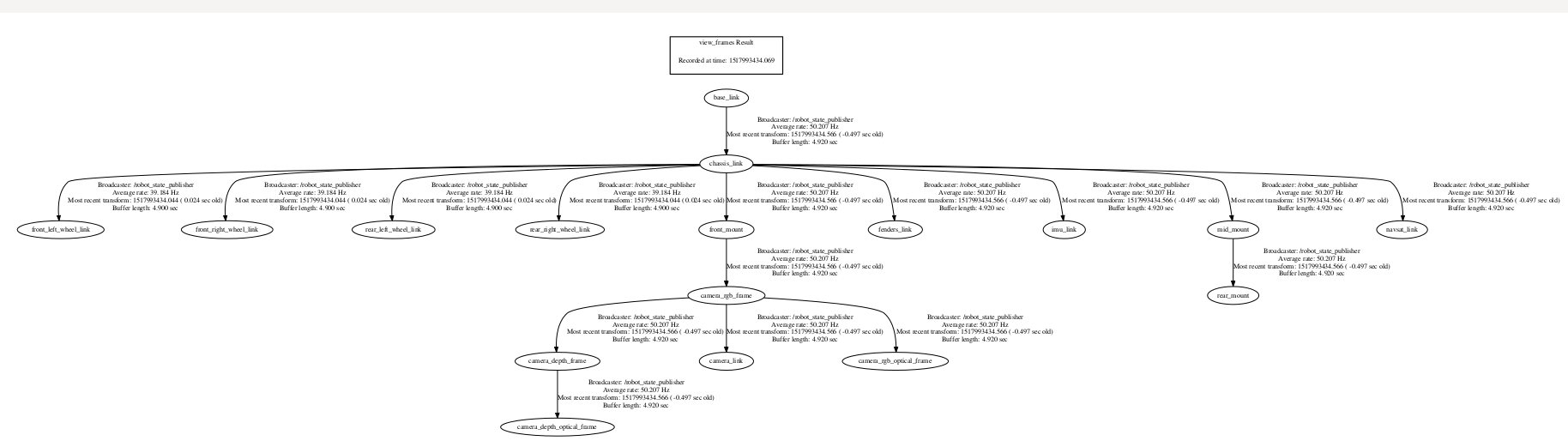
As you can see above the tf between odom and base_link is not yet published , what could be the reason for the same ?
"header: seq: 40 stamp: secs: 1517994494 nsecs: 929254055 frame_id: odom child_frame_id: base_link ...."
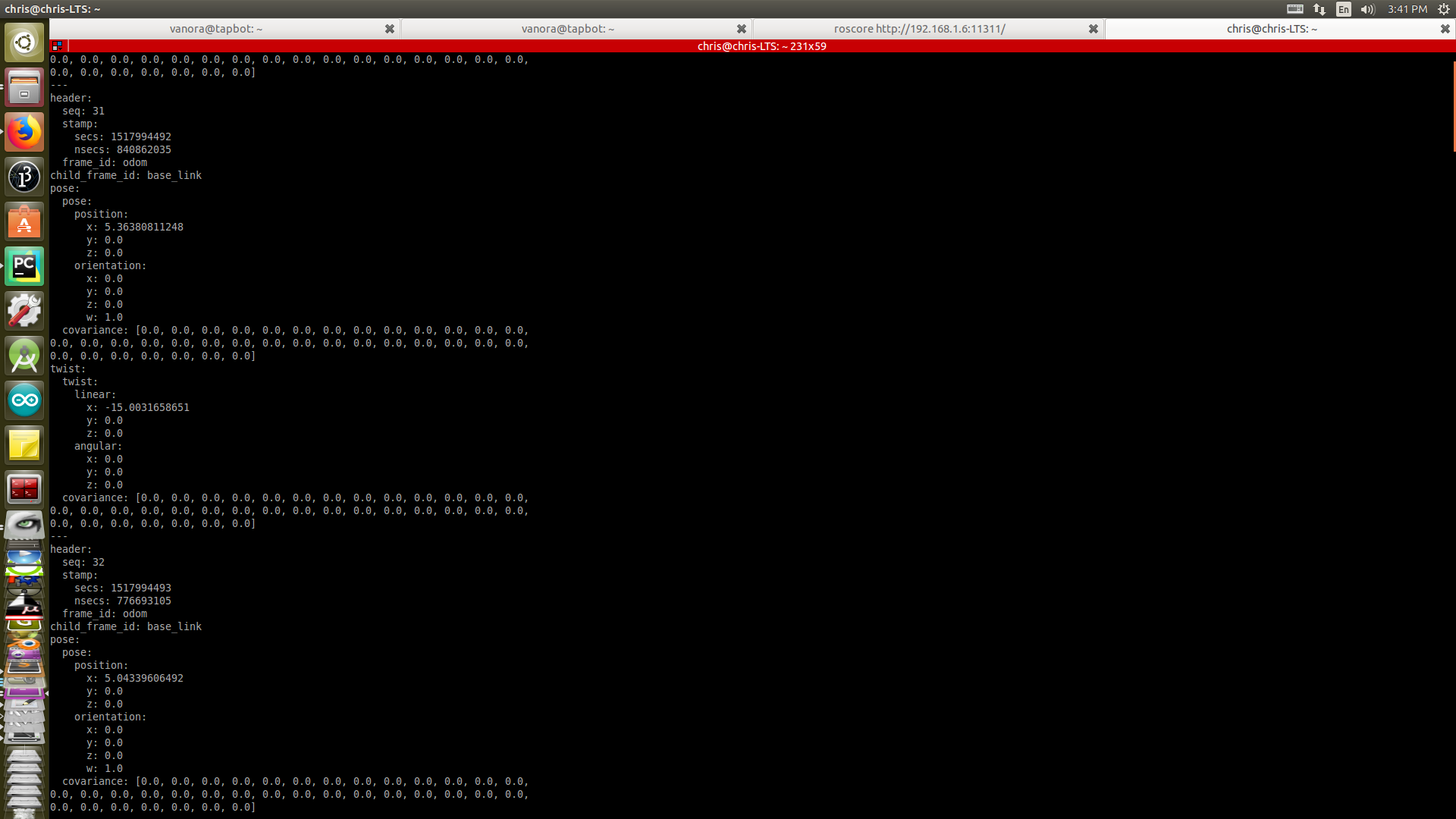
As you can see the child_frame_id of the odom topic is base_link .
add a comment

