
Starting point of teb_local_planner

Right now i have a car which I want to control with the teb_local_planner at walking speed.
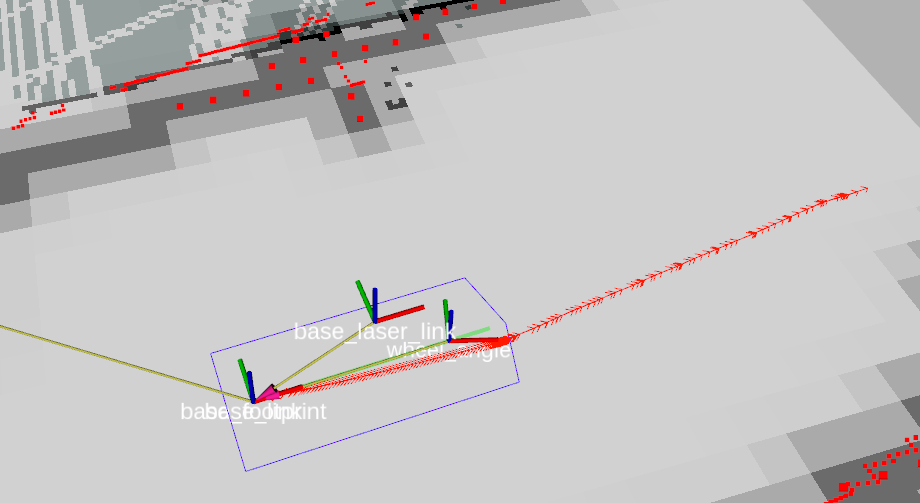
And as the base_link is above the rear axle, the plan is constructed from there through the footprint and out of the front bumper.
So my question is, as the plan inside the footprint is irrelevant, can I use the front bumper as the starting point for the planner?
add a comment
