
How to change the origin of local costmap?
Hello,
I am working on a project where I need an instantaneous occupancy grid. I managed to get the occupancy grid using costmap_2d package. Now the problem is that the occupancy grid generated has the robot exactly in the middle. But, I want the occupancy grid only in front of the robot. I tried changing origin_x and origin_y, but it doesn't have any effect.
max_obstacle_height: 0.60
obstacle_range: 30
raytrace_range: 30
footprint: [[0,-0.8], [0,0.8],[2.6,0.8],[2.6,-0.8],[0,-0.8]] # if the robot is not circular
inflation_radius: 0.50
cost_scaling_factor: 5
map_type: costmap transform_tolerance: 5 # seconds
# origin_x: -15.0
# origin_y: -30.0
origin_z: 0.0
z_resolution: 0.2
z_voxels: 2
publish_voxel_map: false
global_frame: odom
robot_base_frame: /base_footprint
# global_frame: azcar_sim/odom
# robot_base_frame: azcar_sim/base_link
update_frequency: 5.0
publish_frequency: 2.0
static_map: false
rolling_window: true
width: 60
height: 30
resolution: 0.3
transform_tolerance: 0.5
plugins:
- {name: obstacles, type: "costmap_2d::ObstacleLayer"}
obstacles:
observation_sources: scan
# scan: {data_type: LaserScan, sensor_frame: azcar_sim/front_laser_link, topic: /azcar_sim/front_laser_points, marking:true, clearing: true, min_obstacle_height: 0.0, max_obstacle_height: 3} scan: {data_type: LaserScan, sensor_frame: /base_laser_link, topic: /base_scan, marking: true, clearing: true, min_obstacle_height: 0.0, max_obstacle_height: 3}
Please refer to the images below.
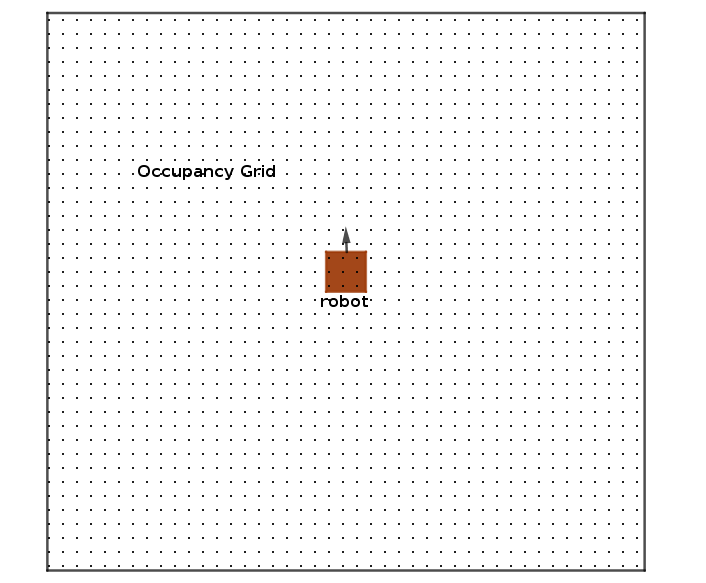
The occupancy grid, I am getting using the above parameters.
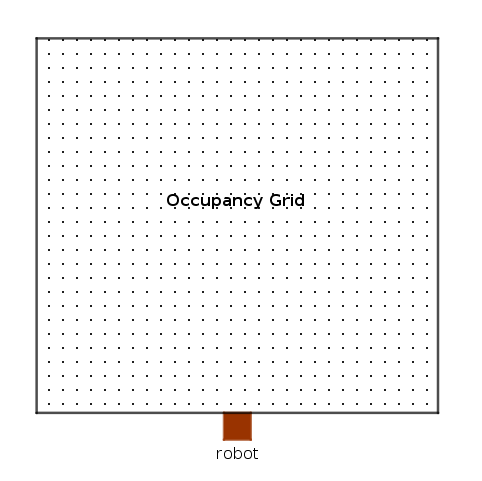
The occupancy grid needed.

Your images are not visible.
Please attach them directly to your post. I've given you enough karma to be able to do that.
@gvdhoorn Thanks. I have added the images.