overlapping occupancy grid maps
Hi,
I need to overlap two pose estimation (from the particle filter) with the map asociated to each of them (the map is the same). After that i need to merge both maps.
As a first step I am choose one pose estimation as fixed and I am trying to rotate and translate the otherone to overlap the fixed one (map included). The problem is that I dont know how to rotate and translate de occupancy grid map.
An image with the problem description is attached.
Thanks in advance!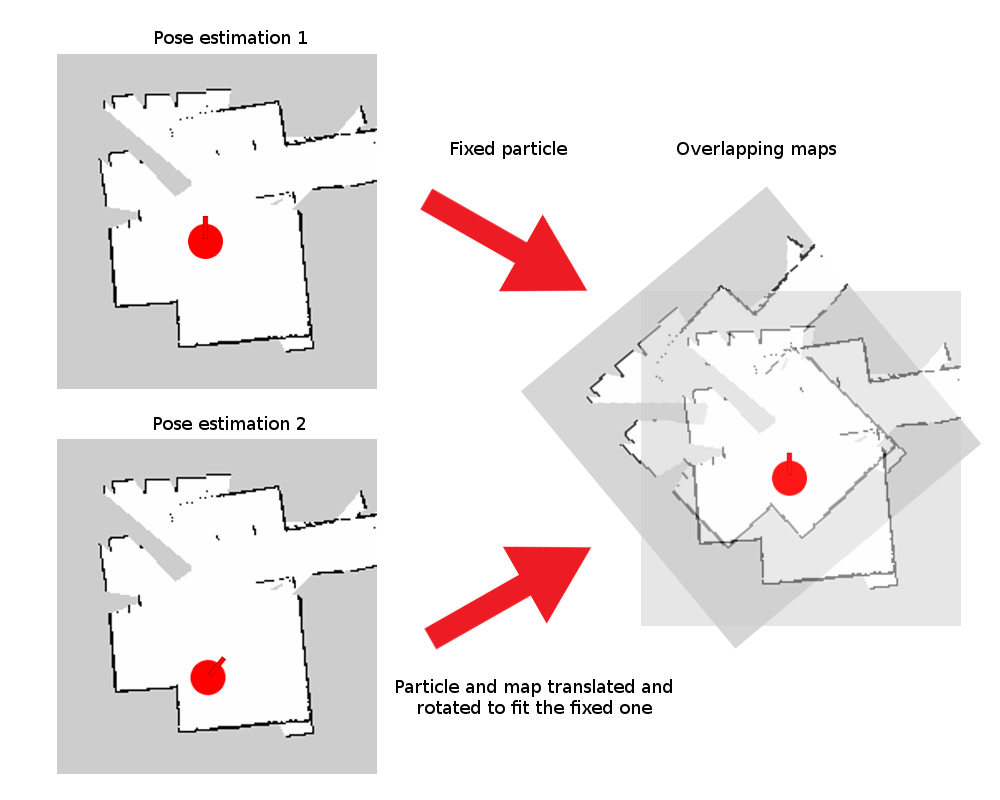
add a comment