
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
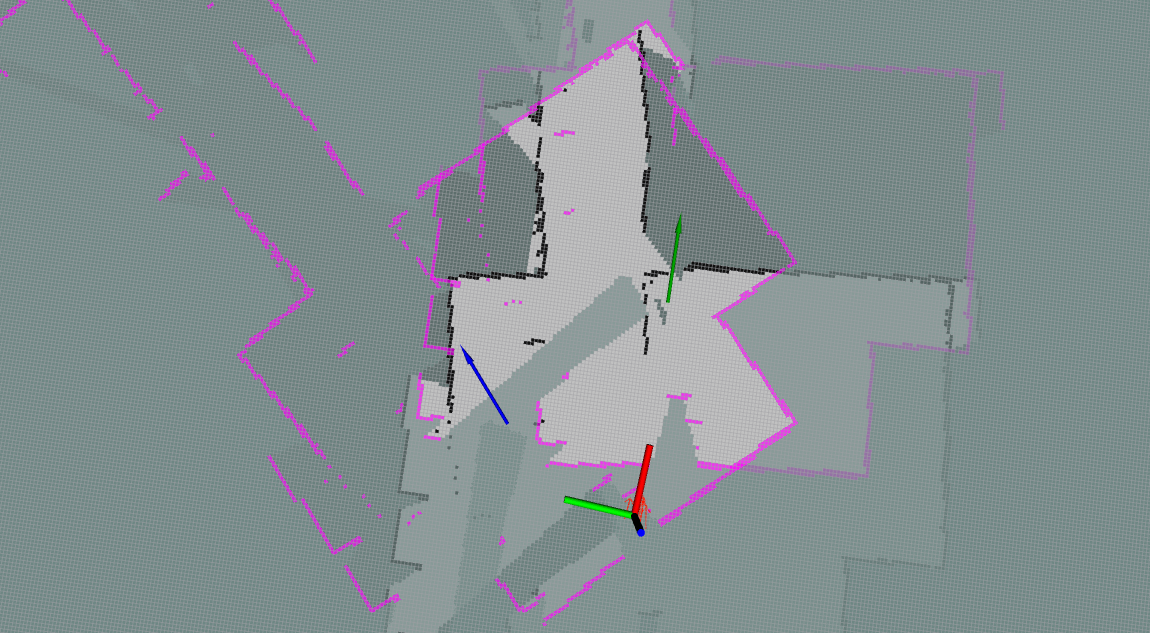
I finaly could resolve this problem. The way I did it was 1) Calculate the offset between fixed pose and the other pose 2) Create a frame (with tf2 tools) applying the translation and rotation between the poses 3) Then copy the original map, and set the frame_id with the frame created in 2)
You can see the results in the picture.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.