
Sensor fusion with RGB-D SLAM and IMU
Hi I am using Rtabmap and IMU in order to fuse my map (RGB_D SLAM) with robot localization package but after fusion i have mismatching as photo already sheared in my result part, i have tried different ways but i could not solve my problem. this is my launch file .
We discussed before here part1 and part2 .
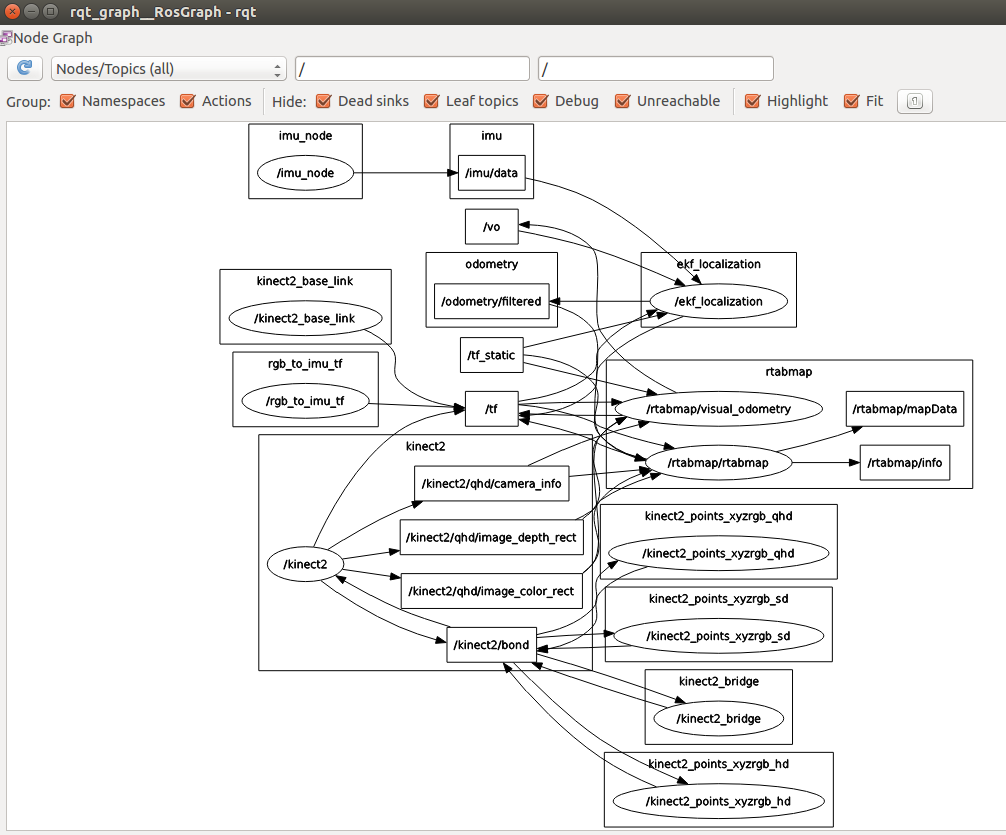
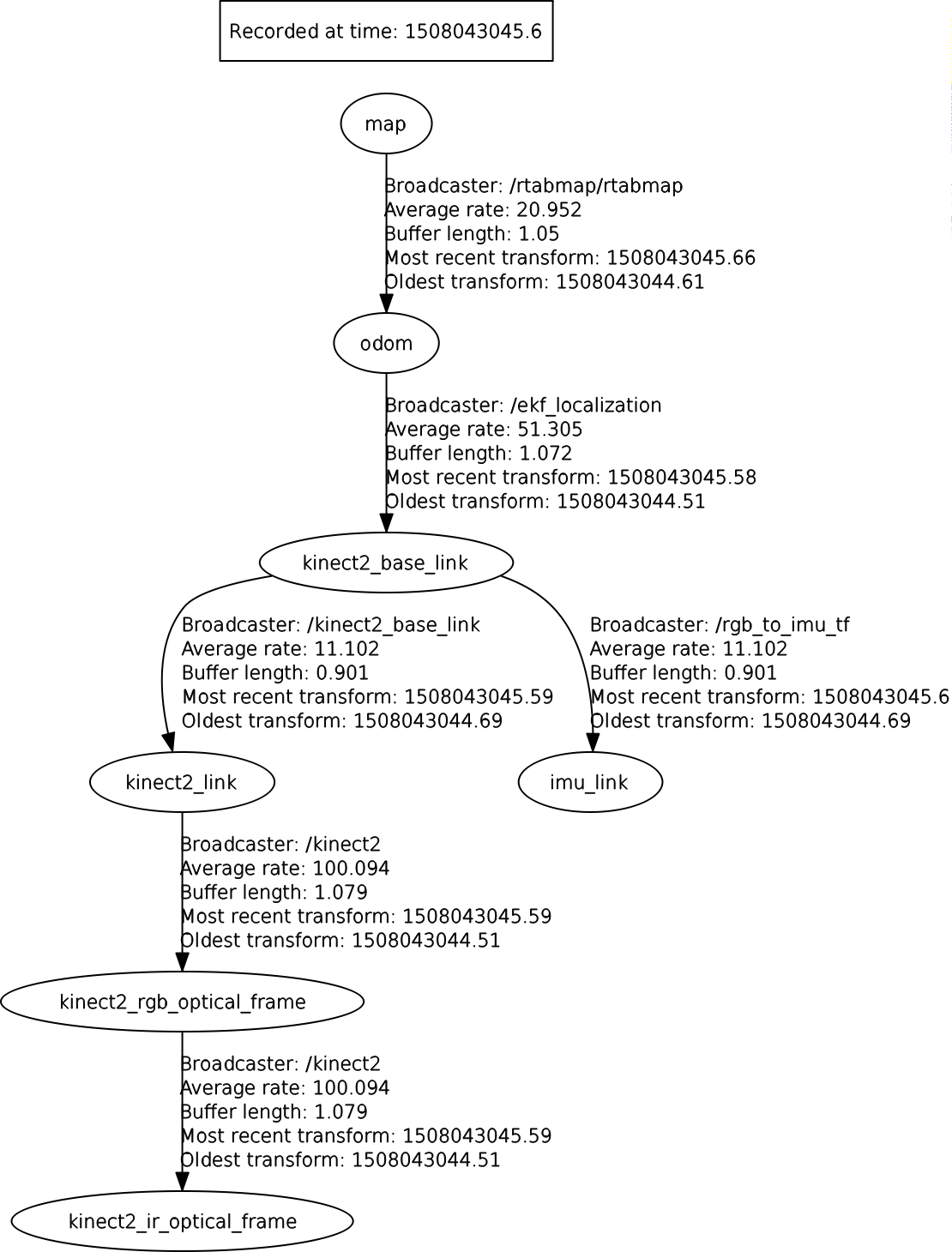
this is my graph topic :
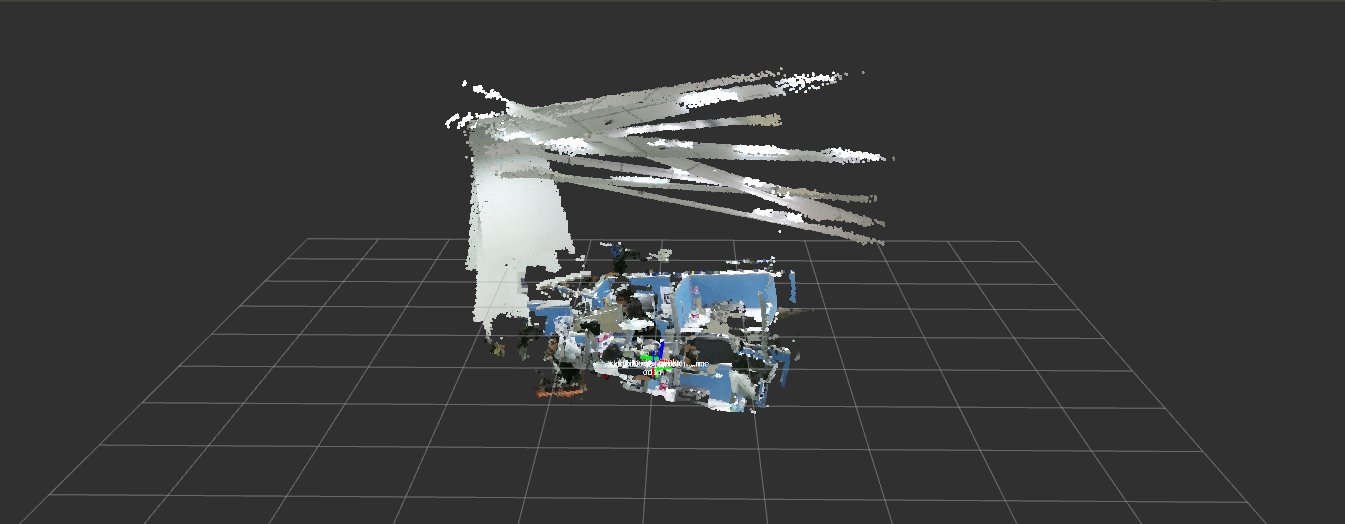
 my result:
my result:
Thank you in advance

Please attach all your images directly to this question. I've given you enough karma to do that.
Thank you , i have uploaded my photos.