
robot_localization and gmapping - how the transform should be done?
We are trying to use robot_localization and gmapping. What we have done so far: we use gmapping to publish the transform between map -> odom. Then we tried to apply gps, imu and odom using ekf from robot_localization. We use navsat_transform and one ekf node to fuse all the data. This node does odom -> base_link transform. This setting does not work very well.
Here: https://roscon.ros.org/2015/presentat... (page 4) there is a picture: 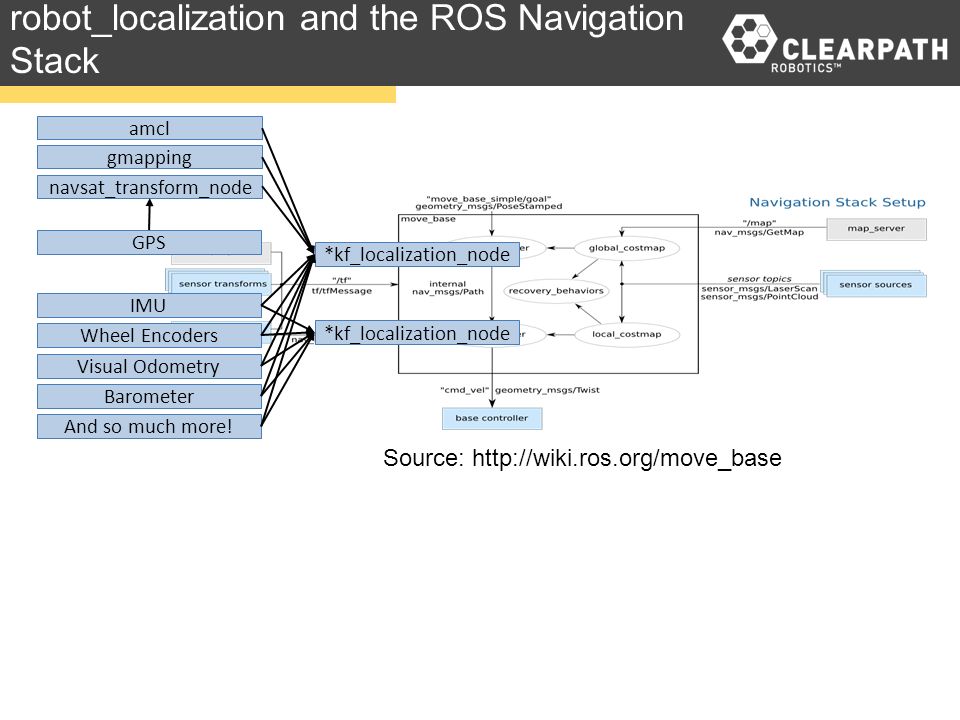
This indicates, that I should fuse gmapping and navsat_transform result in one localization node. Should this be done? How should it be done? Is there an example of it?


Can you tell us how are you configuring gmapping and robot_localization? Specifically the parameters base_frame and odom_frame in gmapping and the parameter base_link_frame in robot_localization.
Also, have you tried other robot_localization packages? like robot_pose_ekf for example.
As explained in the presentation video: The upper is a either-or relation. So you fuse either gmapping or amcl or navsat_transform. This is because all these nodes provide an absolute position.
Haven't tried robot_pose_ekf. base frame is base_footprint, odom frame is odom. In robot_localization, base_link_frame is base_footprint. About Humpelstilzchen's comment, how could I use laser and gps together?
I am have the same issue. Any help please.
Hey, Ago and Deep, did you get your setup to work?