
Gripper Visualization mismatch
Hello there,
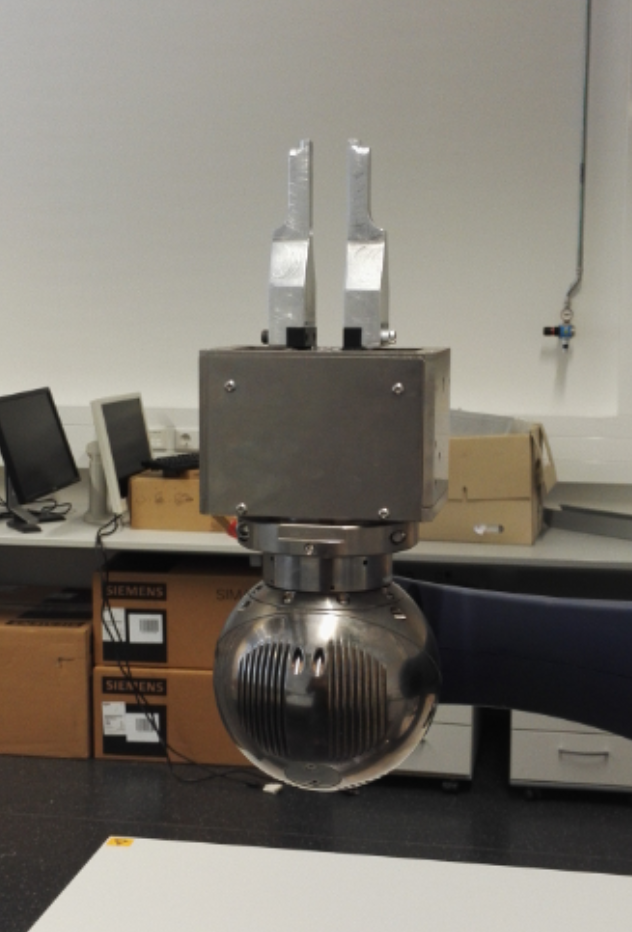
I am trying to control a gripper (PG 70). Connecting to the real Hardware i encountered the following prblem:
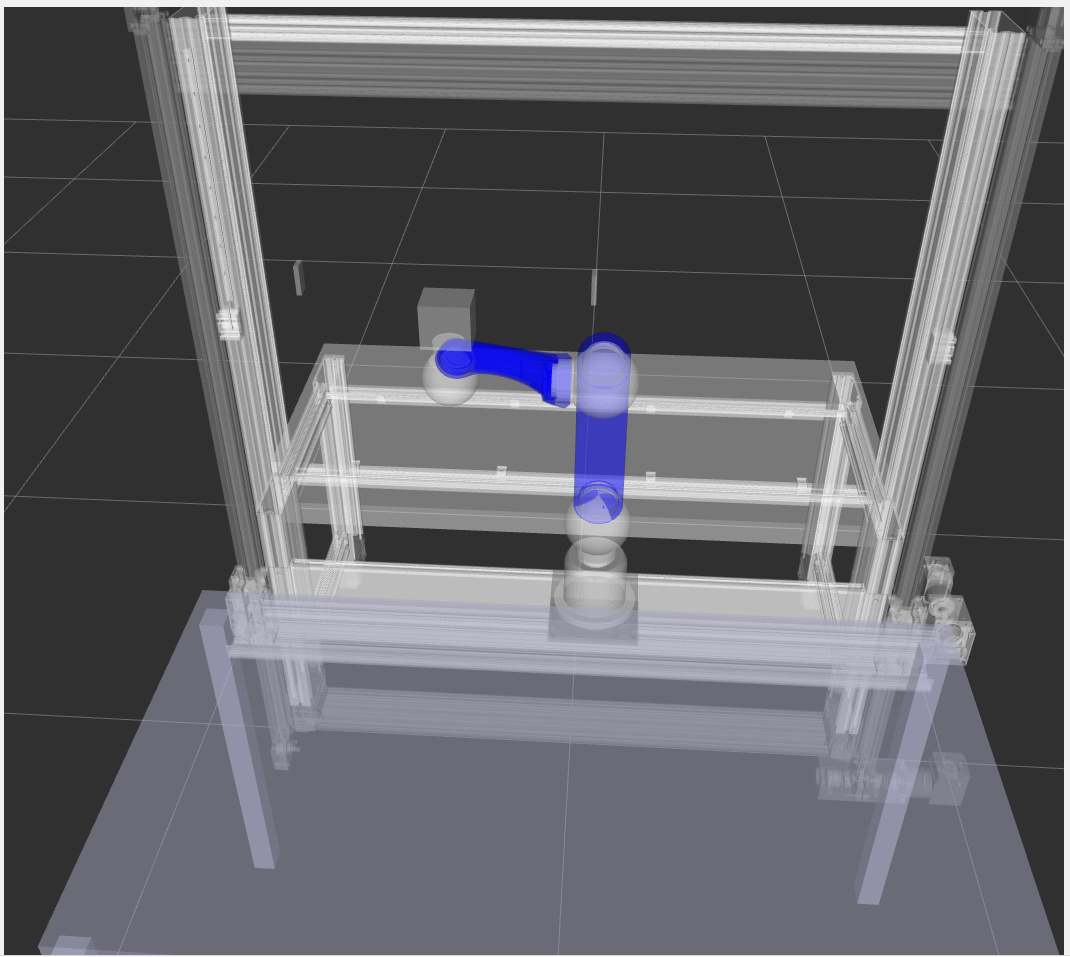
The Gripper position displayed in RViz doesn't match the real Grippers Position, which results in the inability to perform certain movements due to wrong collision detection.
I am running ROS Indigo on Ubuntu 14.04. To connect the Hardware I use ipa_canopen
Any Ideas?
Edit: Moved the other question here
add a comment
