
How to connect VLP-16 (confused about the tutorial)

I try to connect VLP-16 to indigo in four ways, but all failed and led to the same result (no data was printed through command "rostopic echo /velodyne_points" and "rostopic echo /velodyne_packets"):
First method, refer to tutorial about VLP-16 http://wiki.ros.org/velodyne/Tutorial...
1 Access the Gnome Menu (Super key), type "Networks Connections" then run it.
2 Select the connection's name and click on "edit".
3 Choose the IPV4 Settings tab and change the “Method” field to "Manual". Set as below, according to http://answers.ros.org/question/23599... :

Is the setting correct?
4 sudo ifconfig eth0 192.168.3.100
5 I don't what it means in tutorial: "Add a static route to the LIDAR's IP address. The IP address can be found on the CD case which was included with the LIDAR. sudo route add 192.168.XX.YY eth0", since I don't have a CD. What should XX and YY be? Or can I skip this step?
Second method:
1 sudo route add 192.168.1.201 eth0 (Without turning off wire and change the settings in "Network Connections")
Third method:
1 sudo ifconfig eth0 192.168.1.77 (Without turning off wire and change the settings in "Network Connections")
Fourth method: 1. sudo ifconfig eth0 192.168.1.77
- sudo route add 192.168.1.201 eth0
After any of the methods,
I applied:
$ roscore
change to the correct workspace
$source devel/setup.bash
$ roslaunch velodyne_pointcloud VLP16-points.launch
Then, $ rostopic echo /velodyne_points
$ rostopic echo /velodyne_packets
no data was printed from any command above
Or
rosrun rviz rviz -f velodyne
After open the interface:
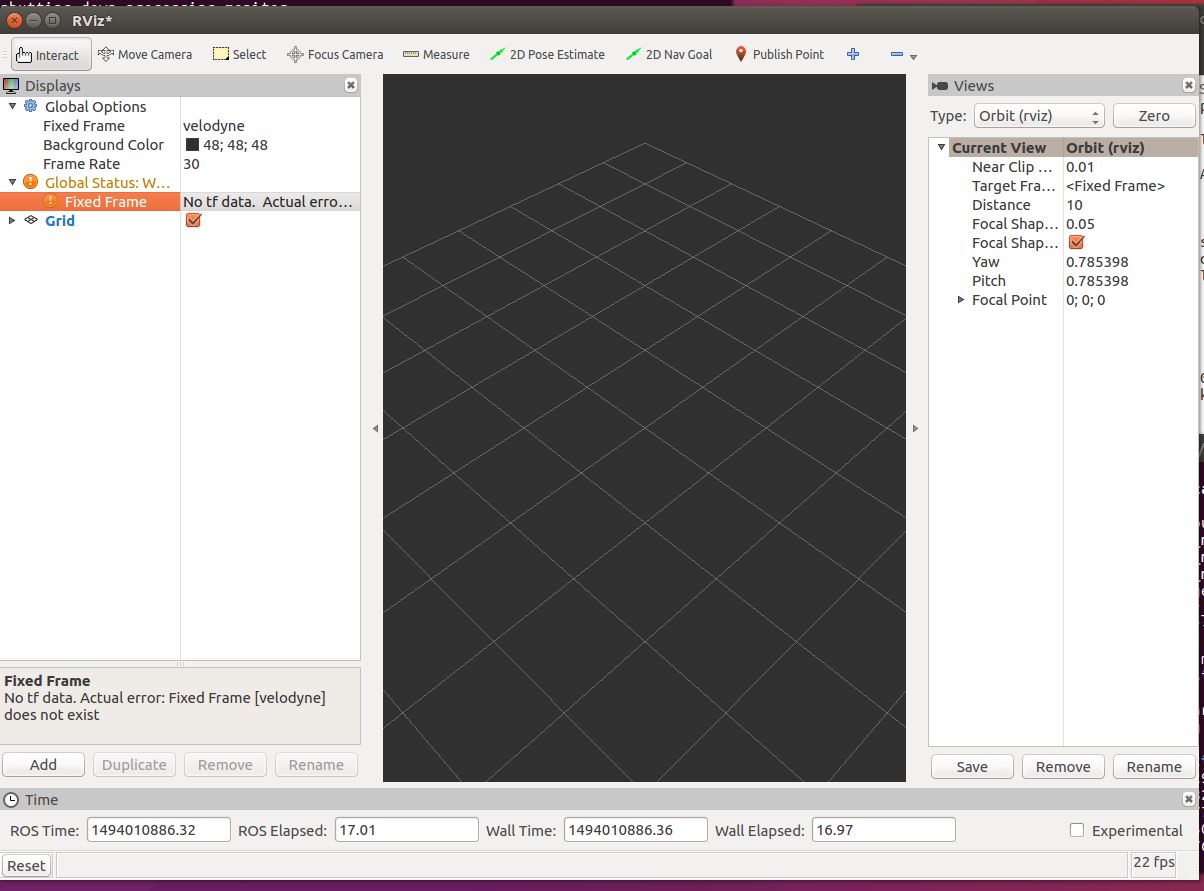 "No tf data. Actual error: Fixed frame [velodyne] doesn't exist"
"No tf data. Actual error: Fixed frame [velodyne] doesn't exist"
So, what's wrong with the connection to VLP 16? Can you provide me with a detailed and correct way to connect VLP 16 to indigo (Don't mention the tutorial. It is based on HDL-32E)?
Thanks for you all!
