
How to plot the path and the movement of a robot?
I am using turtlebot in gazebo and rviz. The robot moves from A to B, and I am wondering if there is an easy way (without the need to use matlab) to plot
- the path that robot finds (e.g. based on the situation the robot can choose different path)
- the movement of the robot from it's current position to the goal (how robot moves to reach its goal)
- the robot's distance to obstacles around
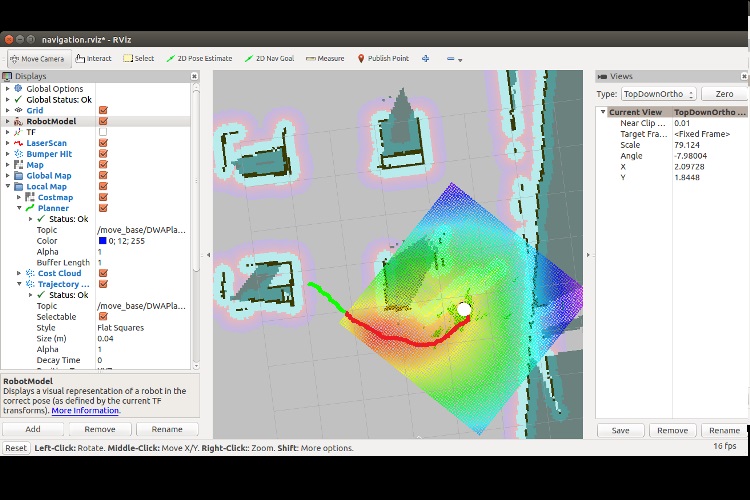
link:Image
Using rqt_plot can solve this problem?
add a comment

{kind=link}