
Different Axes of rotation arrangement for UR5
Since the new version of UR driver available for CB3 UR's, the urdf from the ur_description from fmauch fork can extract the factory calibration of the manipulator. Hence I want to use that version of the urdf to generate the IkFast plugin. However, no matter how I tried the result is still unsuccessful with no solutions: 1.0! While I used the melodic-devel branch of the ur_description the IkFast plugin finished with:
openravepy.databases.inversekinematics: testik,
success rate: 0.932000,
wrong solutions: 0.000000,
no solutions: 0.068000,
missing solution: 0.867000
Then I used view_ur5.launch to examine the differences between the two different urdf and it shows: the fmauch fork uses the z axis as the axis of rotation for all the joints, whereas the molodic-devel uses the y axis as the axis of rotation for the joints.
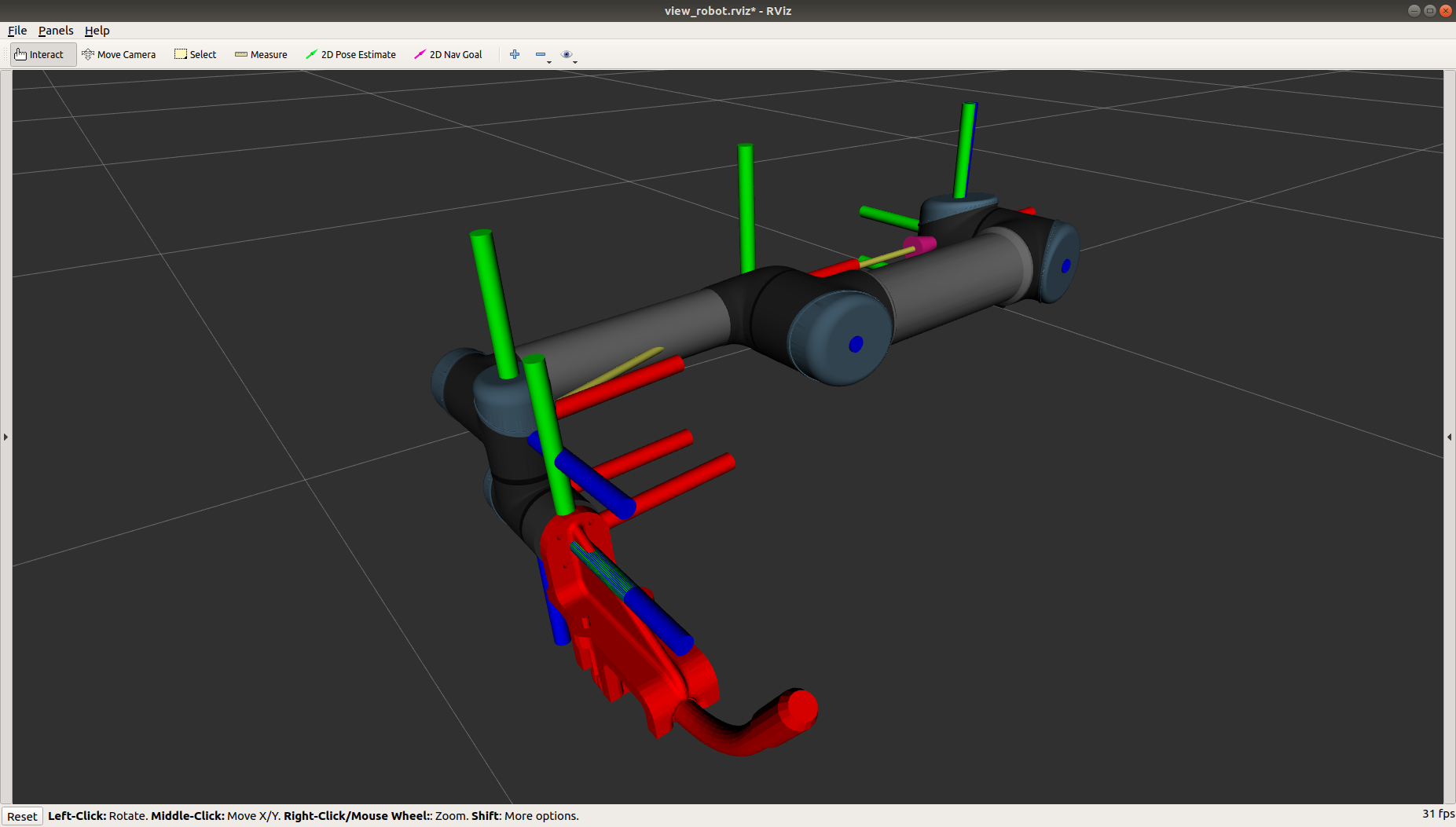
The above is the ur5 view for the fmauch fork.
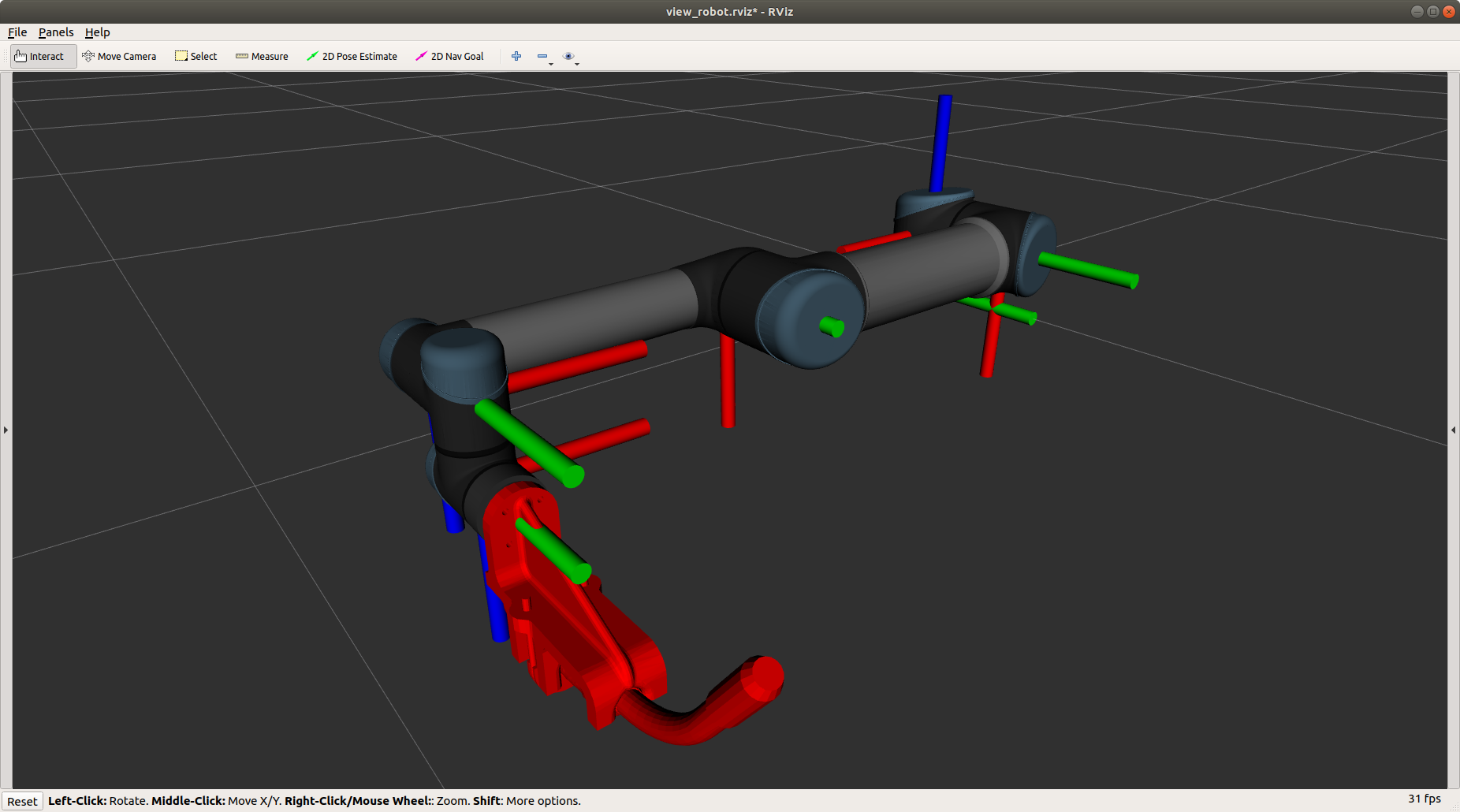
The above is the ur5 view for the melodic-devel.
Is there anyway to put the calibration data into the melodic-devel urdf or how to change the fmauch urdf to use the y axis as the axis of rotation for the joints? Because I suspect the different axis of rotation for the joints is the reason causing one can generate the IkFast plugin and the other cannot.
Thank you very much for your help.
Victor Wu.
