
Problem with 180 degree turn
Hi everyone,
Whenever I give a goal exactly opposite to the robot i.e., 180 degree to the robot, the robot is not able to turn and moving straight with velocity of 0.1m/s untill it reaches any obstacle and getting stuck. This is happening only when i give goal exactly opposite to the robot. If the angle is less than 180 degrees, it is able to turn. I went through DWA local planner but not able to find any solution. Can someone explain how to solve this problem?
I am attaching the link for the video
I am using ROS Indigo, Ubuntu 14.04 and dwa as local planner
Update:
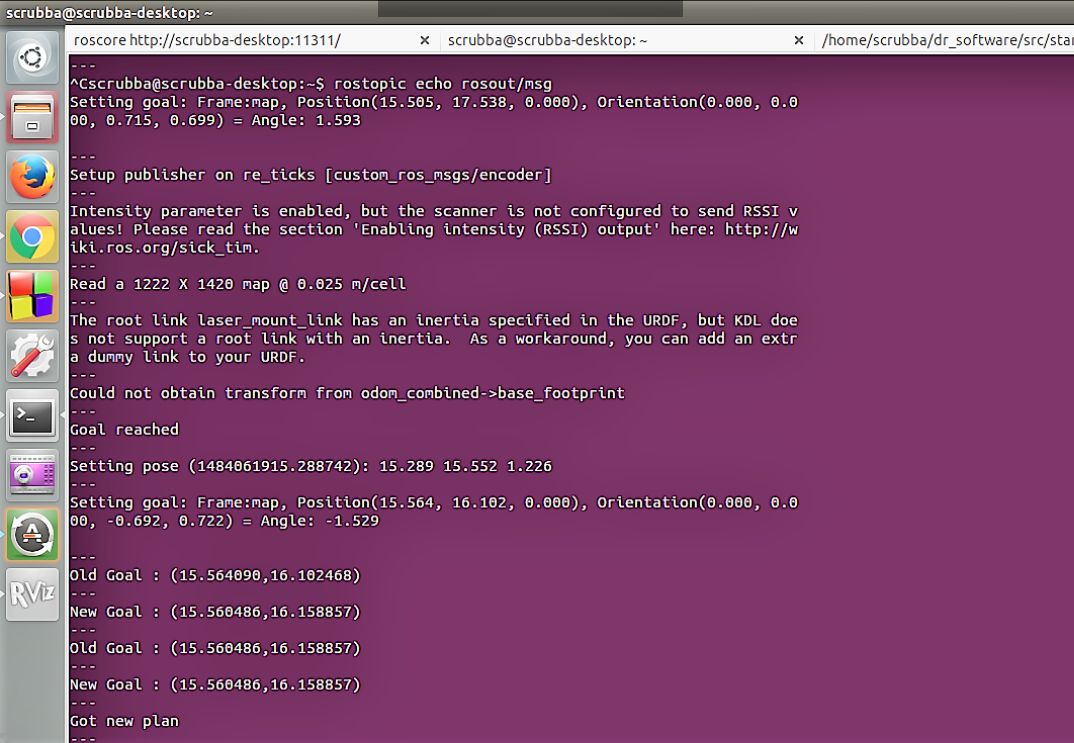
I am attaching the photo of rostopic echo rosout/msg
Update 2:
Attaching the image of /move_base/DWAPlannerROS/cost_cloud in rviz


Can you also post the output of rosout/msg when you gave a goal opposite to the robot?
Hi David, thanks for the reply. I attached the output of rosout/msg, please review it and let me know if you need any other details.
Hm... cant say much from the rosout. What if you turn on the
/move_base/DWAPlannerROS/cost_cloudin RVIZ when you give the opposite goal. Please post this photo of costcloudHi David, I added the image of rviz by turning on the cost cloud, i don't see any difference when i turn on the costcloud. Do i have to make any other changes to notify the costcloud?
I have a similar problem to you where my robot navigates fine for every other goal other than ones behind it that require it to turn 180. In my case the robot doesn't move forward but instead it gets stuck rotating left, right, left, right... until it breaks a threshold and goes to the goal.
However, in my case I have set the values for min_vel_x and min_trans_x both to be 0, as I want to allow my robot to do in place rotations, otherwise I expect I may have the same behaviour as you. I believe it is related to the symmetry between how good turning left and right are.
I have the same problem. Studying the behavior and a little bit the code I think the problem is the lack of a cost for facing in the wrong direction. Therefore all in-place rotations have the same cost and the cost for moving straight or in an arc is almost the same. But I'm not sure if I'm correct.
@Kachimaru how have you solved the problem?