
USARSimROS : [ERROR] Unknown conf type Camera

I am using ROS as a software framework and USARSim as simulator. and using a middleware package usarsim_inf to connect them.
ROS is installed in PC1 (Ubuntu 12.04) and USARSim is installed in PC2 (Windows 7).
i am successfully able to connect both the machine and able to spawn a P3AT in USARSim via ROS. By executing :
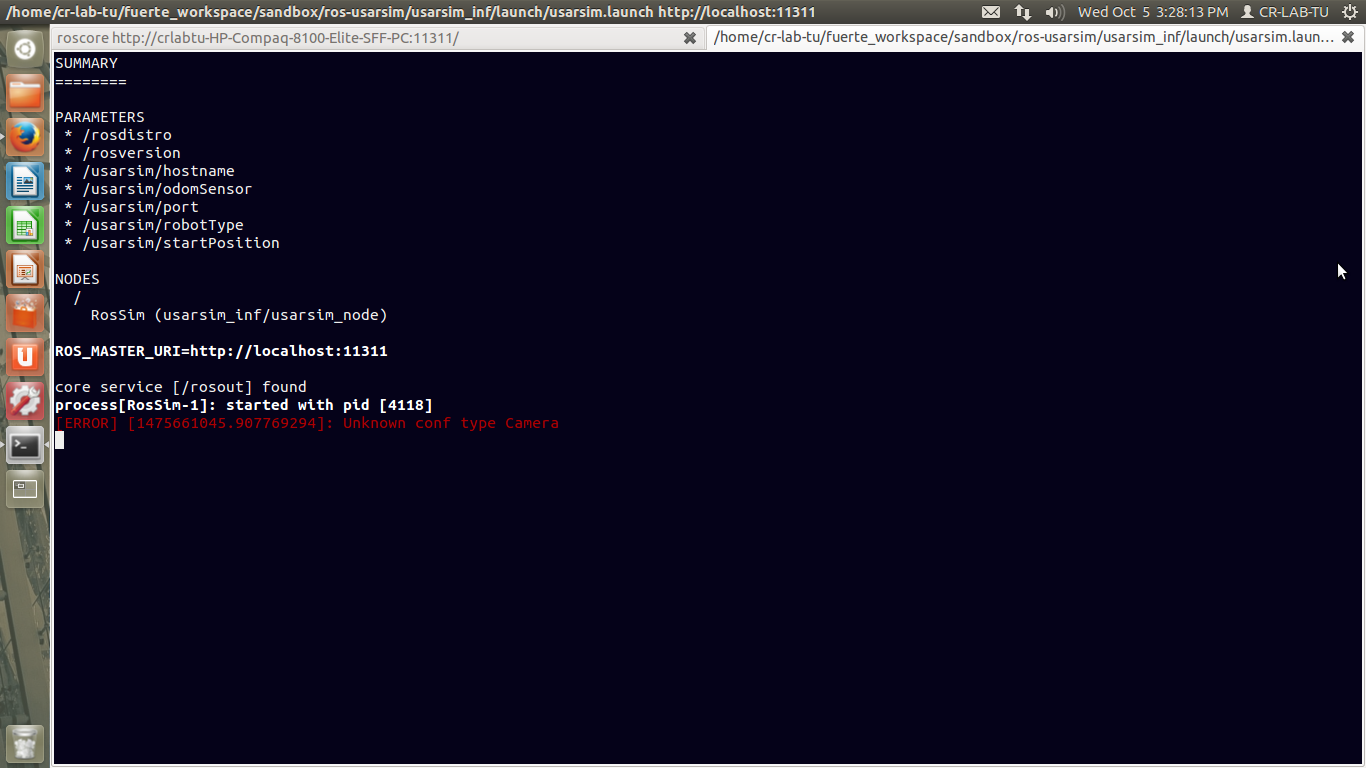
roslaunch usarsim_inf usarsim.launch
ISSUE 1:
[ERROR] [1475661045.907769294]: Unknown conf type Camera
=====================Here is my launch file===============
<launch>
<param name="usarsim/robotType" value="P3AT" />
<param name="usarsim/hostname" value="172.15.15.60" />
<param name="usarsim/port" value="3000" />
<param name="usarsim/startPosition" value="0,0,0" />
<param name="usarsim/odomSensor" value="InsTest" />
<node name="RosSim" pkg="usarsim_inf" type="usarsim_node"/>
<remap from="lms200" to="scan" />
</launch>
==================================================
please suggest.
Solution for ISSUE 1: after commenting AddParts : camera in UDKUSAR.ini, it is no more showing this error. Thanks to @Steveb
;AddParts=(ItemClass=class'USARSensor.USARCamera',ItemName="Camera",Position=(X=0.1005,Y=0.0,Z=-0.42),Direction=(x=0.0,y=0.0,z=0.0))
ISSUE 2:
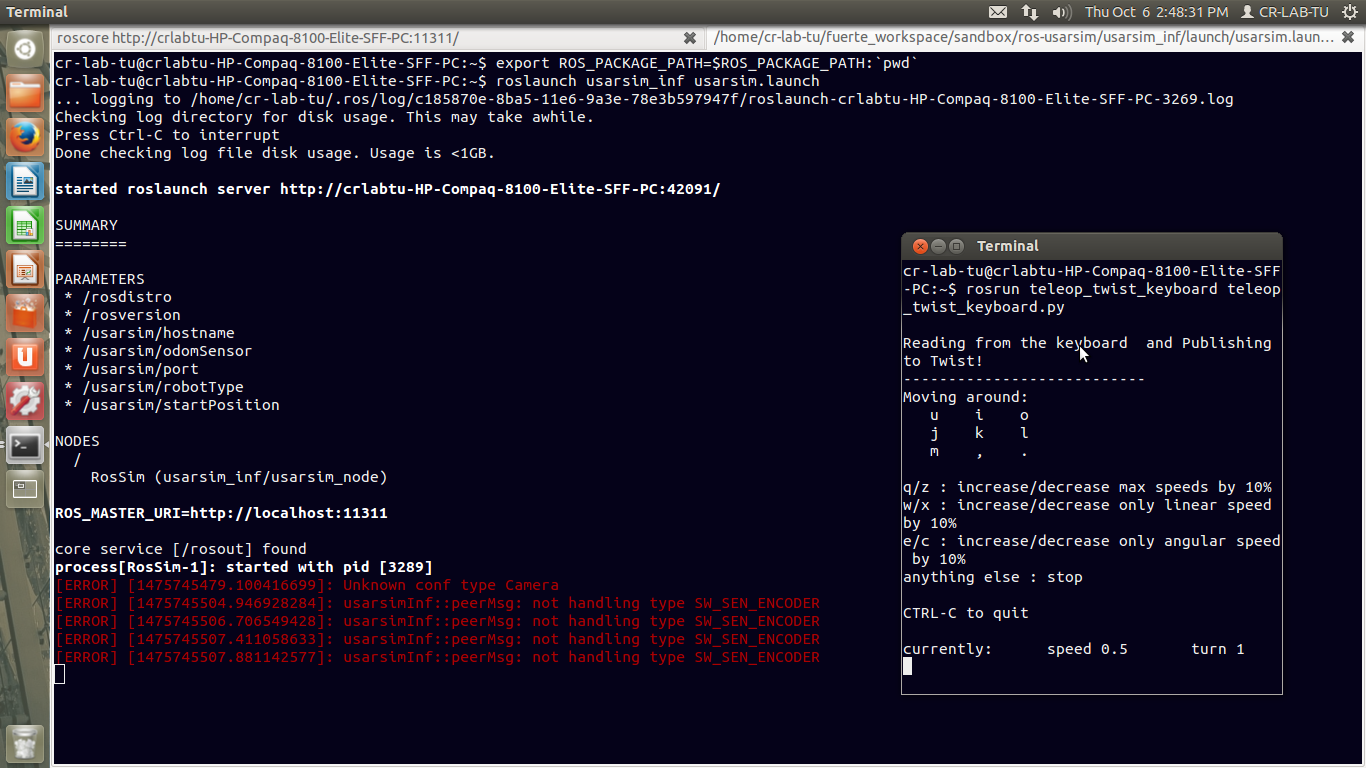
but while running teleop
rosrun teleop_twist_keyboard teleop_twist_keyboard.py
every time i press the key(any key) , it says
[ERROR] [1411920792.568087748]: usarsimInf::peerMsg: not handling type SW_SEN_ENCODER
I commented the Encoder in C:\UDK\UDK-2013-07\UDKGame\Config\UDKUSAR.ini
[USARBot.P3AT]
AddParts=(ItemClass=class'USARSensor.GroundTruth',ItemName="GndTruth",Position=(X=0,Y=0.0,Z=0),Direction=(x=0.0,y=0.0,z=0.0))
AddParts=(ItemClass=class'USARSensor.INS',ItemName="InsTest",Position=(X=0,Y=0.0,Z=-0.2),Direction=(x=0.0,y=0.0,z=0.0))
AddParts=(ItemClass=class'USARSensor.SICK',ItemName="lms200",Position=(X=0.2085,Y=0.0,Z=-0.2),Direction=(x=0.0,y=0.0,z=0.0))
;AddParts=(ItemClass=class'USARSensor.USARCamera',ItemName="Camera",Position=(X=0.1005,Y=0.0,Z=-0.42),Direction=(x=0.0,y=0.0,z=0.0))
AddParts=(ItemClass=class'USARSensor.Tachometer',ItemName="TachTest",Position=(X=0,Y=0.0,Z=0),Direction=(x=0.0,y=0.0,z=0.0))
;AddParts=(ItemClass=class'USARSensor.Encoder',ItemName="W1",Position=(X=0,Y=0.0,Z=0),Direction=(x=0.0,y=0.0,z=0.0))
;AddParts=(ItemClass=class'USARSensor.Encoder',ItemName="W2",Position=(X=0,Y=0.0,Z=0),Direction=(x=0.0,y=0.0,z=0.0))
AddParts=(ItemClass=class'USARSensor.Battery',ItemName="battery",Position=(X=0.15,Y=0.0,Z=-0.20),Direction=(x=0.0,y=0.0,z=0.0))
But problem still exist.
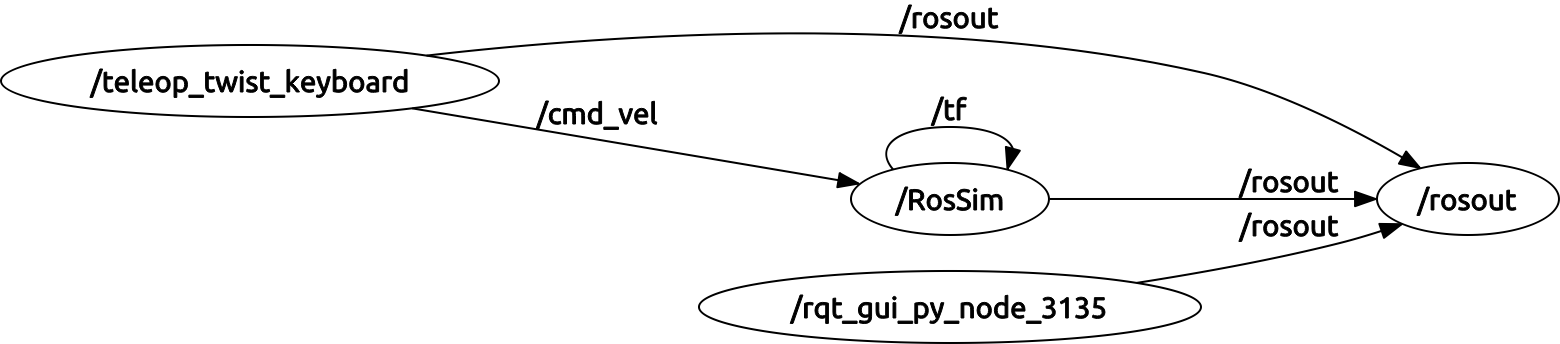
Here is the rqt_graph captured after running above commands.
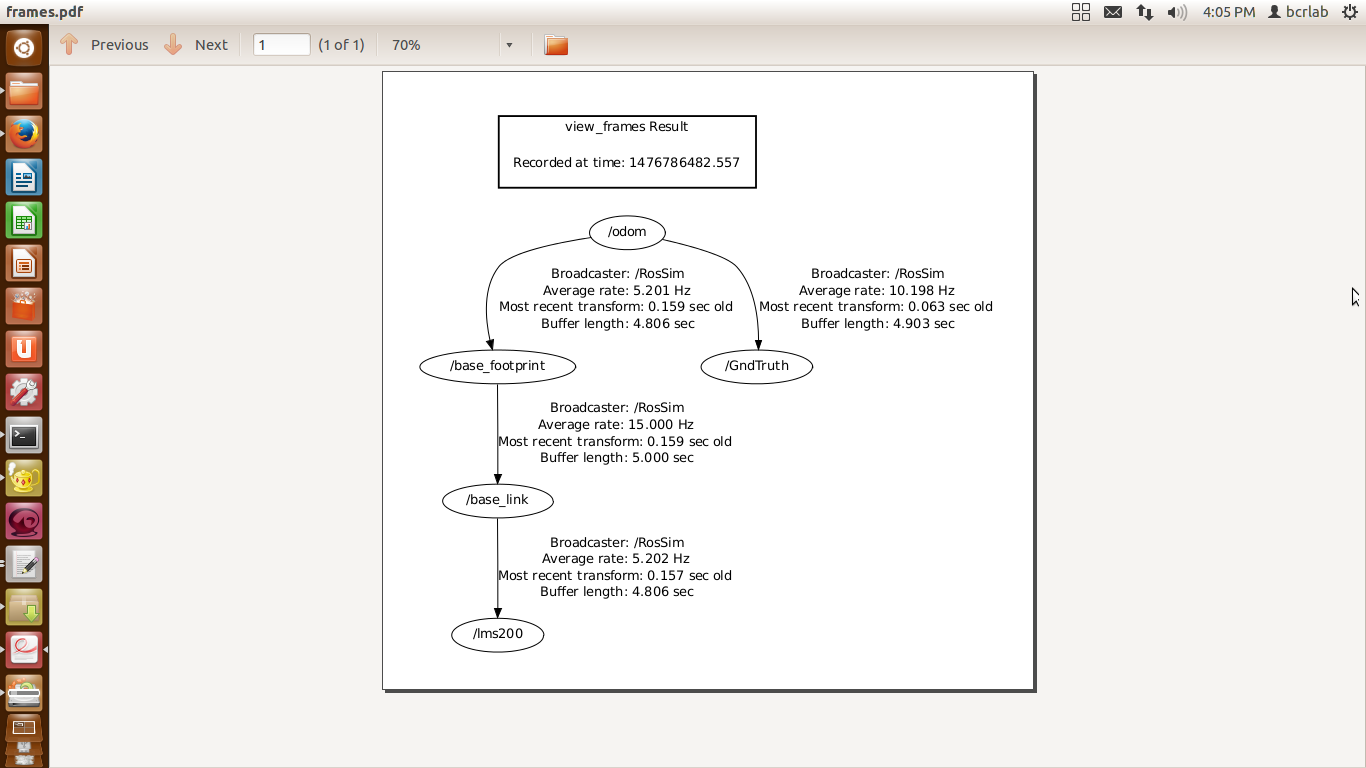
tf Transform tree

https://github.com/hrnr/ros-usarsim/b...
@ahendrix thanks for your suggestion\
but while running teleop
every time i press the key , it says
@ahendrix do you aware of this issue.
I don't know anything about usarsim; I'm just good at searching through code. My comment above was not a suggestion; just an attempt to point you at the code that seems to be generating this message.
The ROS-USARSim bridge has very basic functionality. I believe that the encoder is yet another example of a USARSim sensor that is not currently supported. You can comment this out of the USARSim configuration file. The app should still work. Does it?
@Steveb Unfortunately i am unable to locate the configuration file in UDK folder. Kindly indicate the path.
Thanks in advance for your valuable support.
@Steveb Problem still exist.