
Why does the accuracy of navsat_transform change with heading?

The Problem (in short)
I am using the excellent robot_localization package to localize my robot in an outdoor environment. I'm trying to make the localization as accurate as possible, and it's currently accurate to <25cm (my GPS is accurate to ~20mm so that's what I'm aiming for). However this last 25cm is dependent on the heading of the robot. I.e. the error changes depending on the direction the robot is facing, as demonstrated if I simply rotate 360 degrees on the spot:
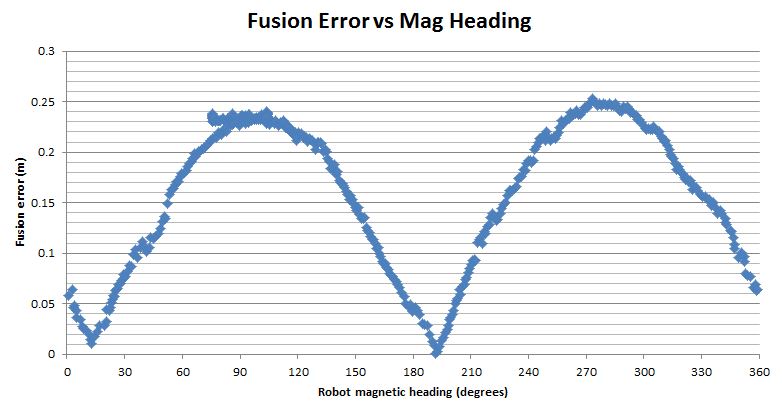
I am trying to find out why this is happening and how I can fix the issue so accuracy is independent of heading. This error is periodic, and consistent across several tests, so I think it is being cause by as systematic error in navsat_transform or in the way the frame transforms are being handled. All info and data is given under "System Information" at the bottom of this page.
The Problem (in full)
I have three sensor inputs: wheel odometry, IMU data, and GPS data. I am using one instance of the ekf_localisation node to fuse wheels and IMU data ("local" odometry) and a second instance to fuse everything ("global" odometry). I am also using an instance of navsat_transform to convert my GPS data to a GPS odometry stream ("gps" odometry) which is what is being used in the global EKF node. When I rotate the robot on the spot, this is the odometry reported for each odometry stream:
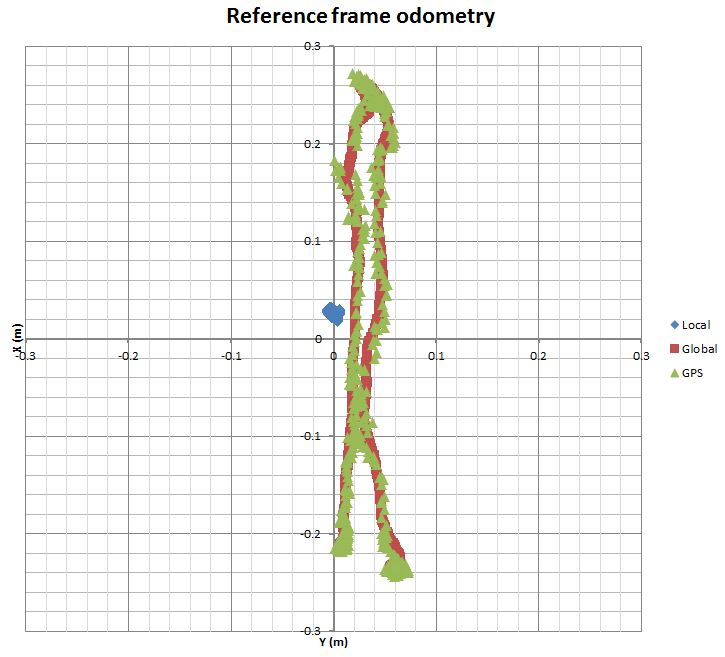
Keep in mind that the local odometry is reported in the local /odom reference frame while the global and GPS odometry are both reported in the global /map frame. This leads me to believe that the problem is related to the navsat_transform node or one of the frame transforms that it uses.
I think there is actually a positive feedback loop in here since the GPS odometry is fused to produce the global odometry, but the position of the GPS odometry is partially determined by the global EKF which determines the location of the /map frame that the GPS odometry is relative to.
Now I know that my GPS is not the problem, because when I directly calculate the GPS UTM coordinates of the center of the robot (/base_link) it is different to the UTM coordinates obtained via sensor fusion (I'm effectively just looking at the origin of /base_link relative to the /utm frame which is broadcast by navsat_transform). This is what I get:
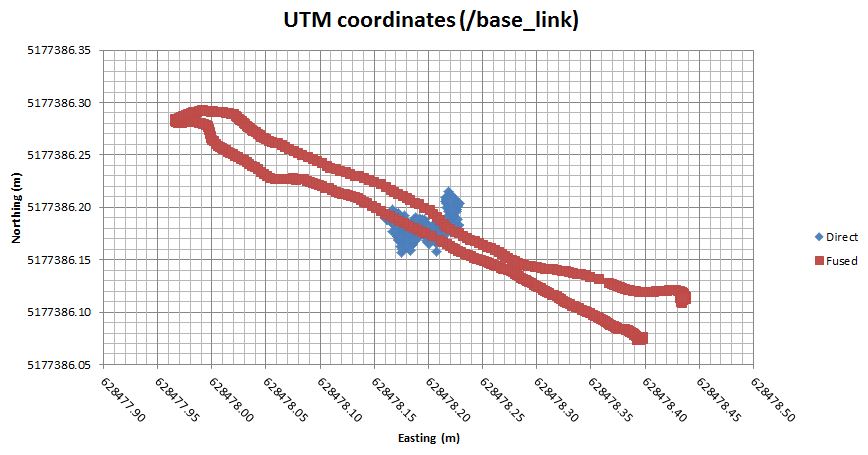
So the directly calculated data indicates that the robot is turning on the spot (as expected) however the UTM coordinates of /base_link relative to /utm match the previous graph. Also, when I directly calculate the UTM coordinates of /base_link I'm using the exact same WGS84->UTM calculations used by robot_localisation and I'm using the exact same magnetic declination as what I've specified in the launch file for navsat_transform.
Now when I watch the reference frames in RViz, the /base_link and /odom do not move relative ...


I don't have an answer, but I wanted to commend you on your thorough analysis and included plots and hypotheses. Let's hope you get a good answer(s) as well.
I think this problem can also solve the drift case of map&odom when integrate with r_l GPS fusion. watching this. please also include @joq know.
because your question is related with integrate errors change with yaw, I know from your launch file, there are two Vyaw elements are integrated into r_l, and the covariance is not very sure, without clearly understand the r_l integrate algorithm, can you only integrate 1 exact Vyaw to verify it?
good work! but about the drift between map and odom, my view is different, I think the map is start of map, odom is start of car, so the two start points is fixed and should not drift when under map frame without consider the fusion error. but of course the start point is obviously drift in r_l..
Thanks! And yes, in theory they should be fixed. But in practice that's how RViz deals with the difference between the global and local odometry. The alternative would be to fix /odom, /map and have two visualizations of the robot - one for each odometry set (it would look like my odometry graphs)
That's part of the reason I print out all the odometry data and plot it in Excel - because then all the odometry is relative to the same origin point. I generally find it easier to debug issues and think about reference frames that way.
It would be nice if you could report that on the proper issue tracker. Visibility of bug reports on ROS Answers is really low / non-existent, so this will likely get lost.
I think cra-ros-pkg/robot_localization/issues is the correct tracker.