
string to a float
Hi, I will like to change the string message of one of my topics to a float
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
Hi, I will like to change the string message of one of my topics to a float
Not nice but the easiest is to just republish it I guess.
import rospy
from std_msgs.msg import String, Float64
rospy.init_node("spam")
p = rospy.Publisher("/topic_out", Float64)
def callback(msg):
p.publish(float(msg.data))
rospy.Subscriber("/topic_in", String, callback)
rospy.spin()
EDIT: You can also write a script that reads from the bag and writes to a new one. Have a look at the rosbag API for that.
EDIT 2:
I am not entirely sure how you subscribe to what but here is how it works for me:
Let's assume I have a node like this that produces the data:
import rospy
import numpy as np
from std_msgs.msg import String
rospy.init_node("data_node")
p = rospy.Publisher("/string_topic", String, queue_size=1)
Fs = 8000
f = 5
sample = 8000
x = np.arange(sample)
y = np.sin(2 * np.pi * f * x / Fs)
r = rospy.Rate(10)
for e in y:
p.publish(str(e))
r.sleep()
which just produces a sine wave and then I save that to a rosbag rosbag record /string_topic which generates the following bag
path: 2016-07-28-08-06-26.bag
version: 2.0
duration: 2:46s (166s)
start: Jul 28 2016 08:06:29.43 (1469689589.43)
end: Jul 28 2016 08:09:16.33 (1469689756.33)
size: 129.3 KB
messages: 1670
compression: none [1/1 chunks]
types: std_msgs/String [992ce8a1687cec8c8bd883ec73ca41d1]
topics: /string_topic 1670 msgs : std_msgs/String
This I can then play rosbag play 2016-07-28-08-06-26.bag and use the script I posted above to subscribe to /string_topic:
import rospy
from std_msgs.msg import String, Float64
rospy.init_node("spam")
p = rospy.Publisher("/float_topic", Float64)
def callback(msg):
p.publish(float(msg.data))
rospy.Subscriber("/string_topic", String, callback)
rospy.spin()
I can the connect /float_topic to rqt_plot and see my data. My connection graph looks likes this:
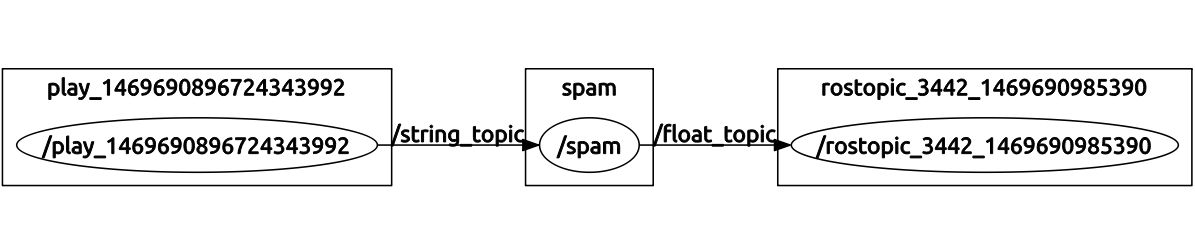
Where on the left you have the rosbag and on the right the rqt_plot.
Maybe your bag contains just the same number in all the messages? Can you upload it somewhere or post some of the example output of the topic you want to plot. Also, the output of rosbag info on your bag would be good.
EDIT 3:
To accommodate the data you got, we would need a different conversion node:
import rospy
from std_msgs.msg import String, Float64
rospy.init_node("spam")
publishers = []
for i in range(6):
publishers.append(rospy.Publisher("/thermal_zone"+str(i), Float64))
def callback(msg):
for s, p in zip(msg.data.split('\n'), publishers):
p.publish(float(s.split(':')[1]))
rospy.Subscriber("/string_topic", String, callback)
rospy.spin()
This is not tested as I do not have the data but it creates 6 publishers which are called thermal_zone0 to thermal_zone5 like in your data. In the callback it tries to split the incoming string based on the line break \n which I assume is in there but might be wrong. It then splits the string again based on the : and takes the right part of it which should be the number and then publishes it as a ... (more)
When i republished it as float, i was not getting the same data i had on my rosbag. I was getting the same number over and over again
In python. From the sample code u wrote, you are subscribing to the node but im subscribing to the rosbag in mine. I already have some recorded data in rosbag which plays as string but i will like them to play as float
I followed your first code but after playing the rosbag and running the python script, I got this error in the link below. The new node couldn't convert the string to float.
Your topic publishes a weird string like: "/sys/device/.../../:35000" and not just a number like "35000.0" so python of course doesn't know how to convert this to a float. You have to parse the string so you only have the number before doing float(). If you want help please edit your question
This is the example of my topic when you echo it. The data has already been recorded so this is what i get when I play the rosbag. http://www.directupload.net/file/d/44... Also this is what i have in my rosbag info http://www.directupload.net/file/d/44...
Asked: 2016-07-25 07:49:02 -0500
Seen: 2,001 times
Last updated: Jul 29 '16
Playback ROS1 bag files in ROS2
stopping rosbag record from script
Is there a way to merge bag files?
Recording Large Rosbags of Lidar & Camera Data
How to migrate a bag file after these two types of changes?
how to extract the data from the packets of Velodyne HDL-32E
How can I convert the KITTI dataset into a bag file?
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.

Does your topic output's numbers in string format?