Hector_mapping map frame raising with z height

Hello All,
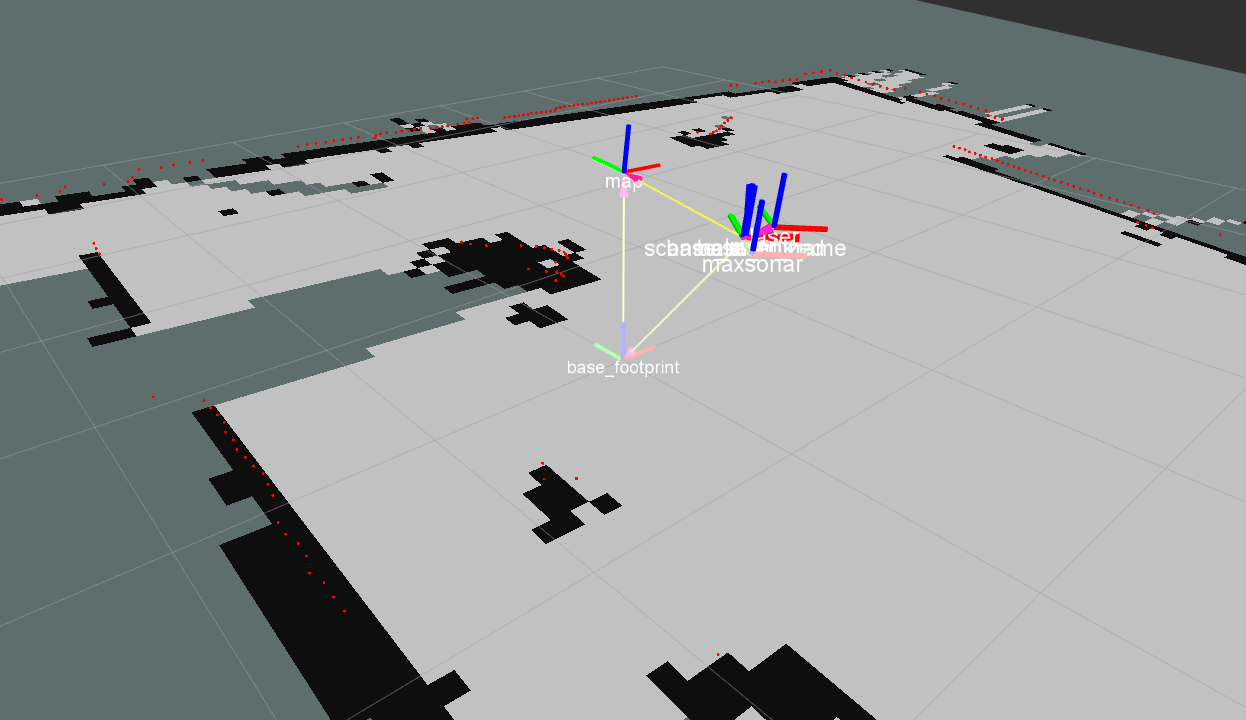
This isn't so much a problem as I am just curious, I am using hector_mapping with octomap_server to make a 3D map of a room. I have a sonar sensor giving me the elevation. I have it all set up and working fine, but there is one slight oddity. The map frame stays at the same elevation as base_link. It looks odd as now the map is rotating and moving around the robot rather than the other way around, and base_footprint appears to be going down through the floor rather than the robot model moving up. I can get around this by setting the fixed frame in RVIZ as base_footprint, but I've seen videos of people doing similar things on YouTube and this doesn't seem to be a problem with anyone else.
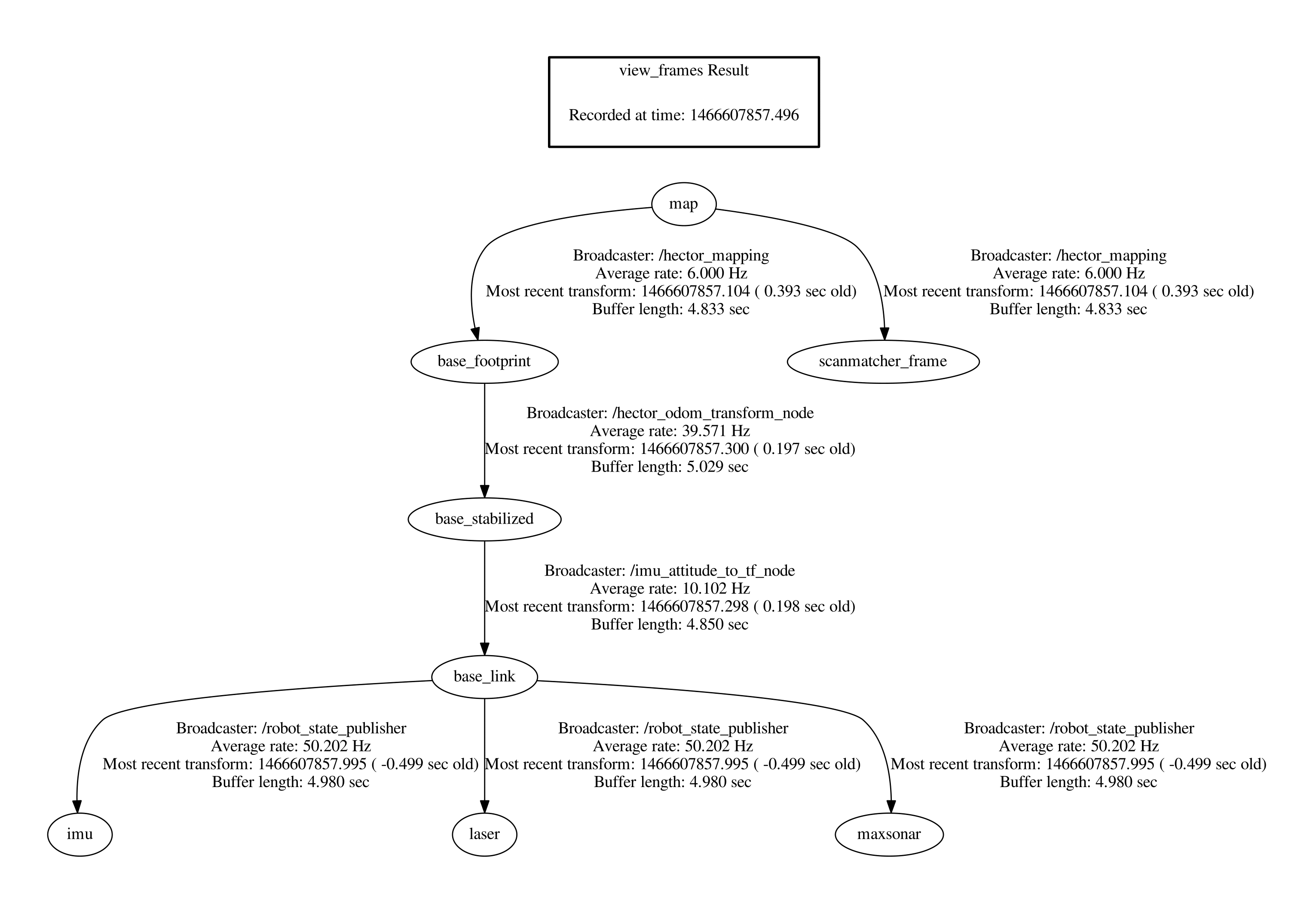
I am getting map->base_footprint from hector_mapping. I've written a node that subscribes to slam_out_pose and height (from the sonar) and publishes the transform from base_footprint->base_stabilized. Base_stabilized->base_link is provided by hector_imu_attitude_to_tf.
If anyone knows why this is happening, I would appreciate the input. As I've said, I have a workaround so it's not critical, but I am curious.
Thanks!