
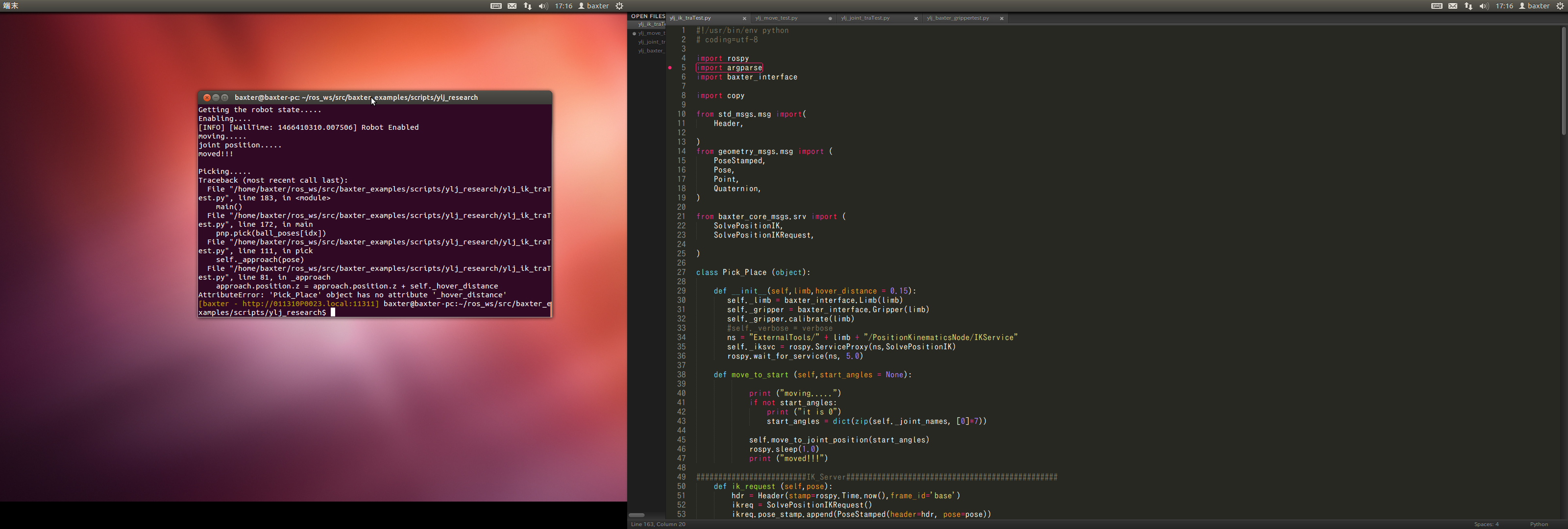
AttributeError: 'Pick_Place' object has no attribute '_hover_distance'
Hi everyone,
Currently, I'm trying to lean program a simple pick and place node by applying IK and move_to_joint_position() in Baxter robot.
My program was base on the example IK Pick and Place Demo program (actually I just simply to modify that program only to apply to the actual robot instead of using the simulator).
After I done the modification and try to run the node, the program was able to move the arm to initial starting position but when going to the first position point it will stop and shows me AttributeError of one of the argument.
This is the error shows:
Traceback (most recent call last):
File "/home/baxter/ros_ws/src/baxter_examples/scripts/ylj_research/ylj_ik_traTest.py", line 194, in <module>
sys.exit(main())
File "/home/baxter/ros_ws/src/baxter_examples/scripts/ylj_research/ylj_ik_traTest.py", line 185, in main
pnp.pick(ball_poses[idx])
File "/home/baxter/ros_ws/src/baxter_examples/scripts/ylj_research/ylj_ik_traTest.py", line 120, in pick
self._approach(pose)
File "/home/baxter/ros_ws/src/baxter_examples/scripts/ylj_research/ylj_ik_traTest.py", line 84, in _approach
approach.position.z = approach.position.z + self._hover_distance
AttributeError: 'Pick_Place' object has no attribute '_hover_distance'
This is my Google drive file link: https://drive.google.com/open?id=0B6J... (inside I already had put in my program node, the example node and the terminal error photo)
Please help me,thank you so much!!

Sorry, the previous time the program node in the link was wrong, I updated the wrong node to my drive. Sorry about that.