
moveit_commander current joint angle position always 0 and pose very different than rviz->scene->
Greetings,
I am working with Linux Ubuntu 14, ROS Indigo, the latest moveit deb, and with both real/simlated baxter with rsdk 1.1.1.
There are two questions to my post.
- Whether I ran the simulation or the real robot, each time I sought to get the current joint position of the robot by calling "current" from the command line, I would get an all zero's value as can be seen in the image below. (This happened even when the arm was not in a straight position)
Simulated Robot: http://answers.ros.org/upfiles/143319... 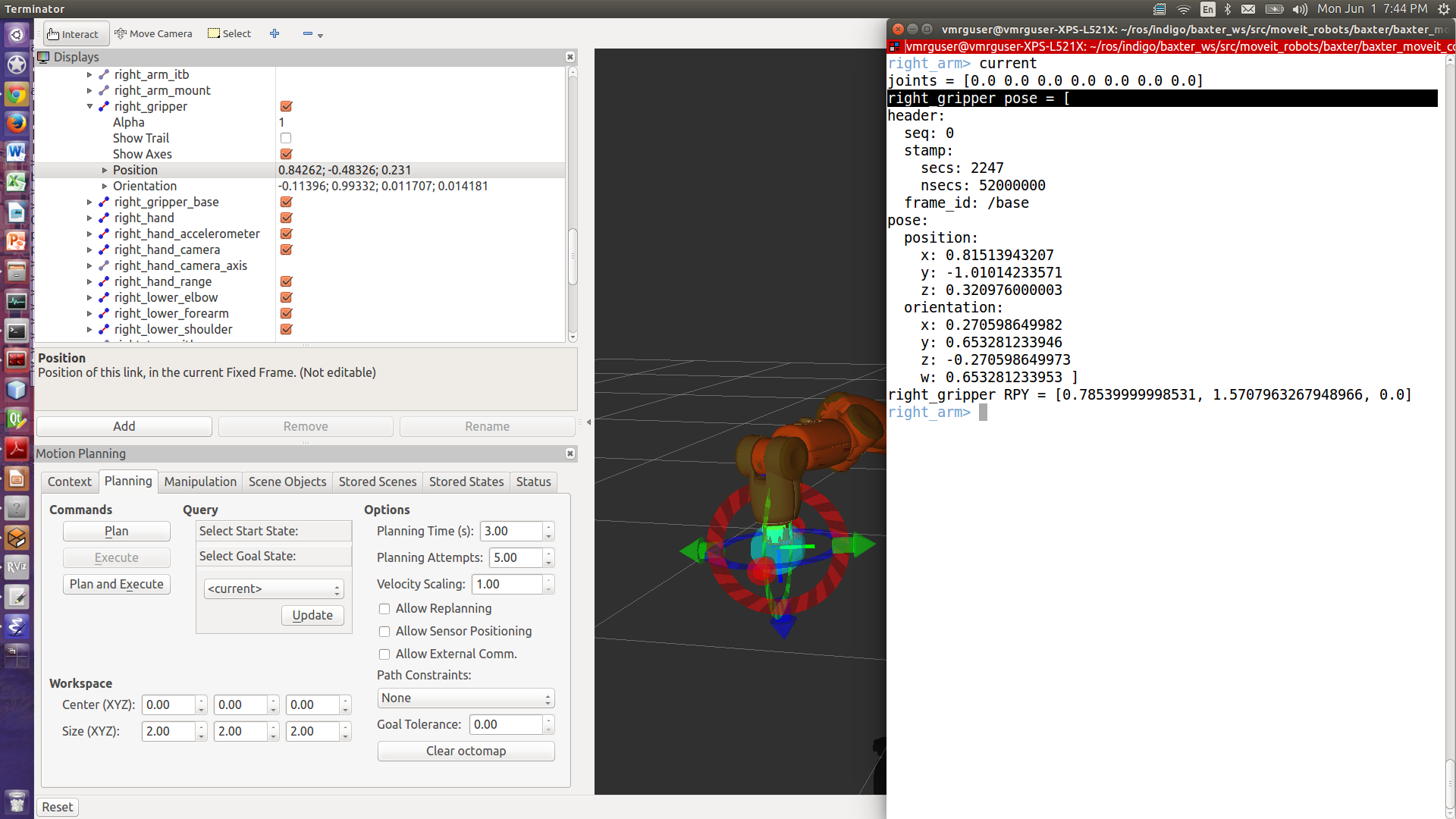
Real Robot: http://answers.ros.org/upfiles/143319... 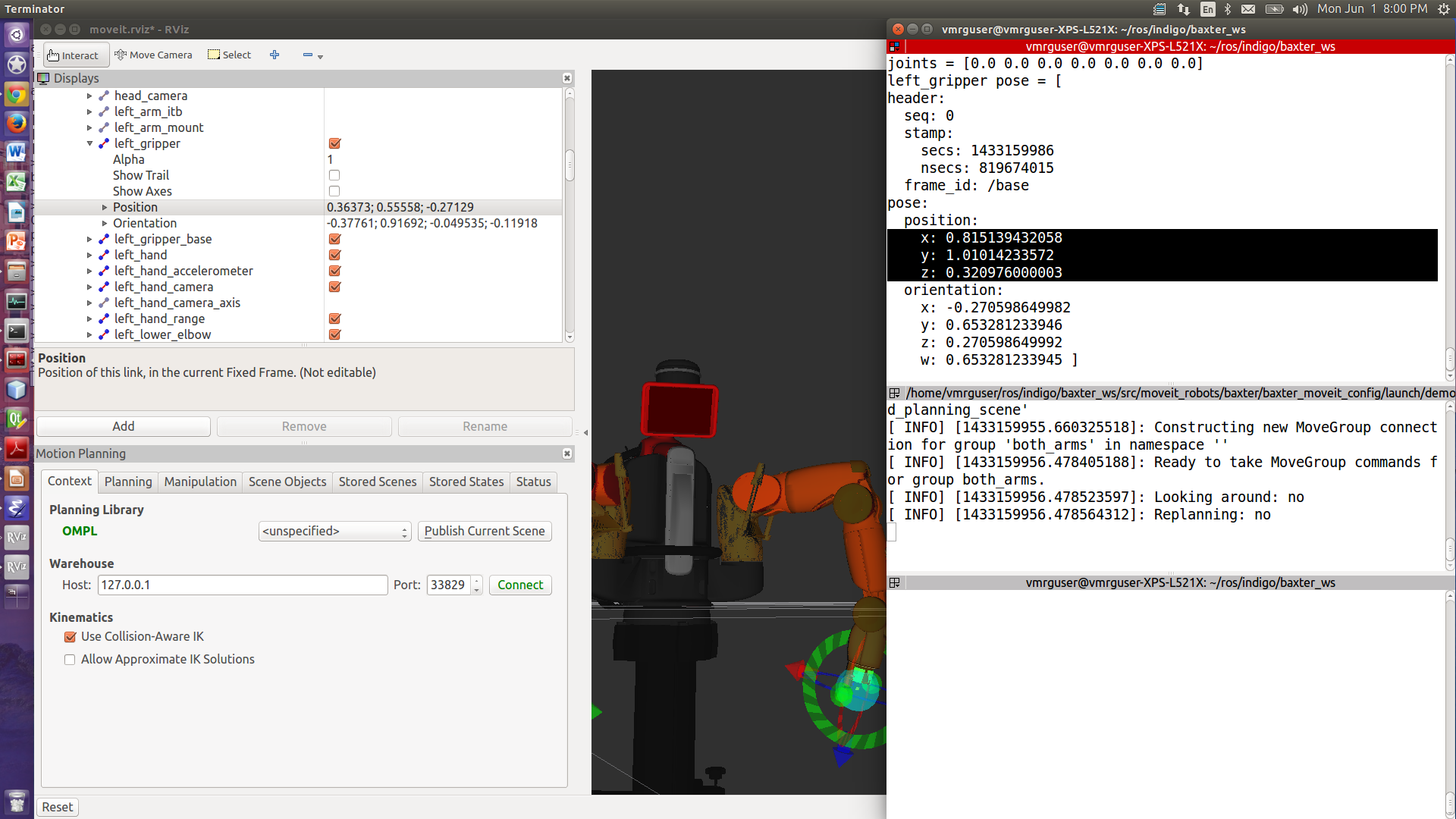
- The other thing that was confusing is that the position/orientation shown in Rviz->Scene Monitor->Links->Position was very different that the pose provided by moveitcommander, very different:
X: 0.84 vs 0.81 (3cm not too bad, but still) Y: -0.48 vs -1.01 (very different) Z: 0.231 vs 0.32 (very different)
Any ideas on this?
For issues, please run: $ env | grep ROS <...paste output here...>

{kind=link}
{kind=link}
This question was also asked on
brr-users. See moveitcommander: current call returns all joints zero but also end-pose different than that shown in rviz.