
costmap not cleared after executing all recovery behaviors
Hi everyone,
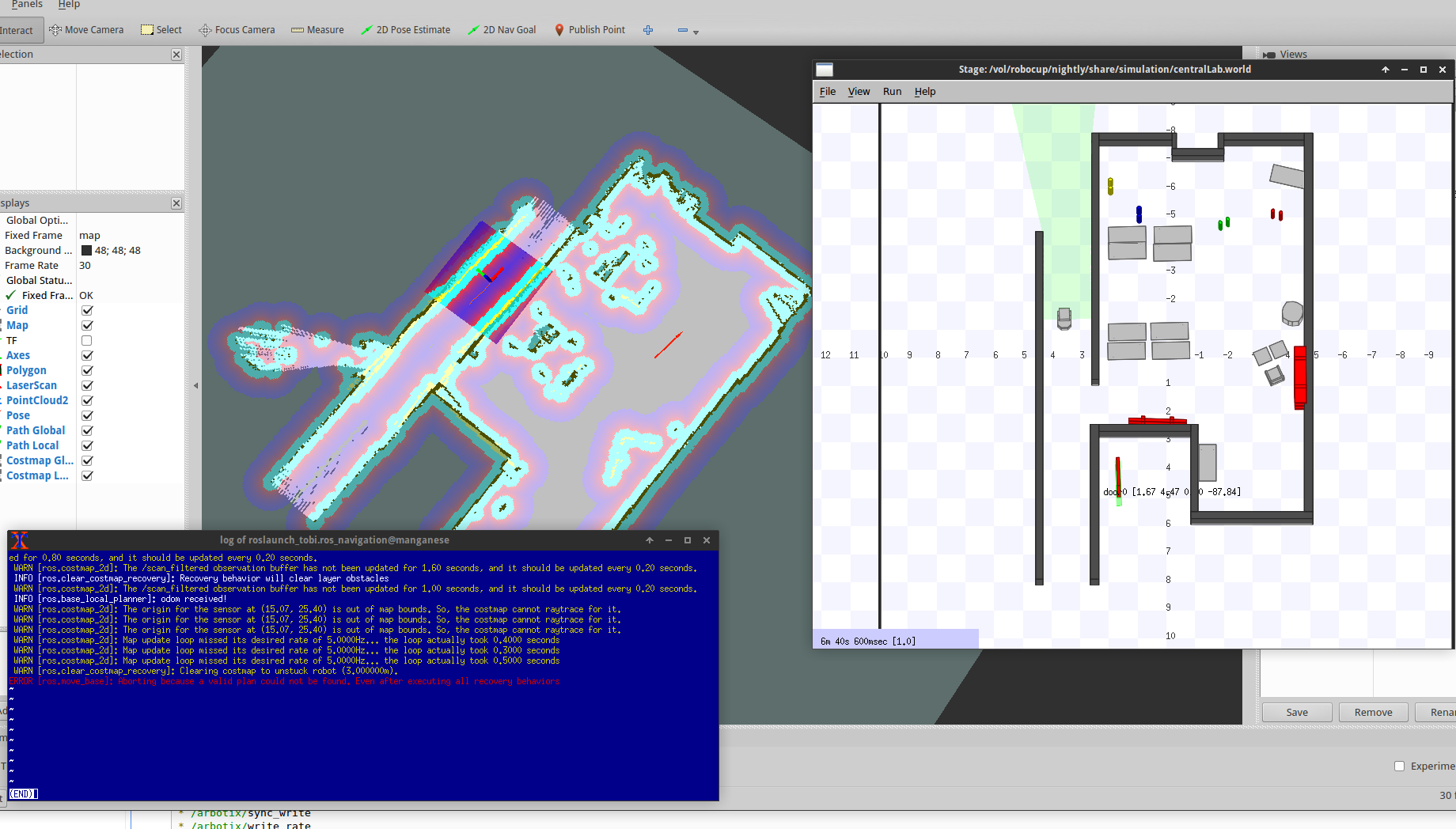
i have a problem with clearing my costmap. First the robot is seeing an obstacle (for example a door, which will be closed infront of him) and then the robot is driving out of distance of the obstacle, but if the robot wants to reenter the room with the closed door opened again it can't plan a new way. Even after executing all recovery behaviors.
Here is a screenshot of my problem:
thank you in advance for your help.
add a comment

