
Move_base: Why is the global costmap different?
Hi all,
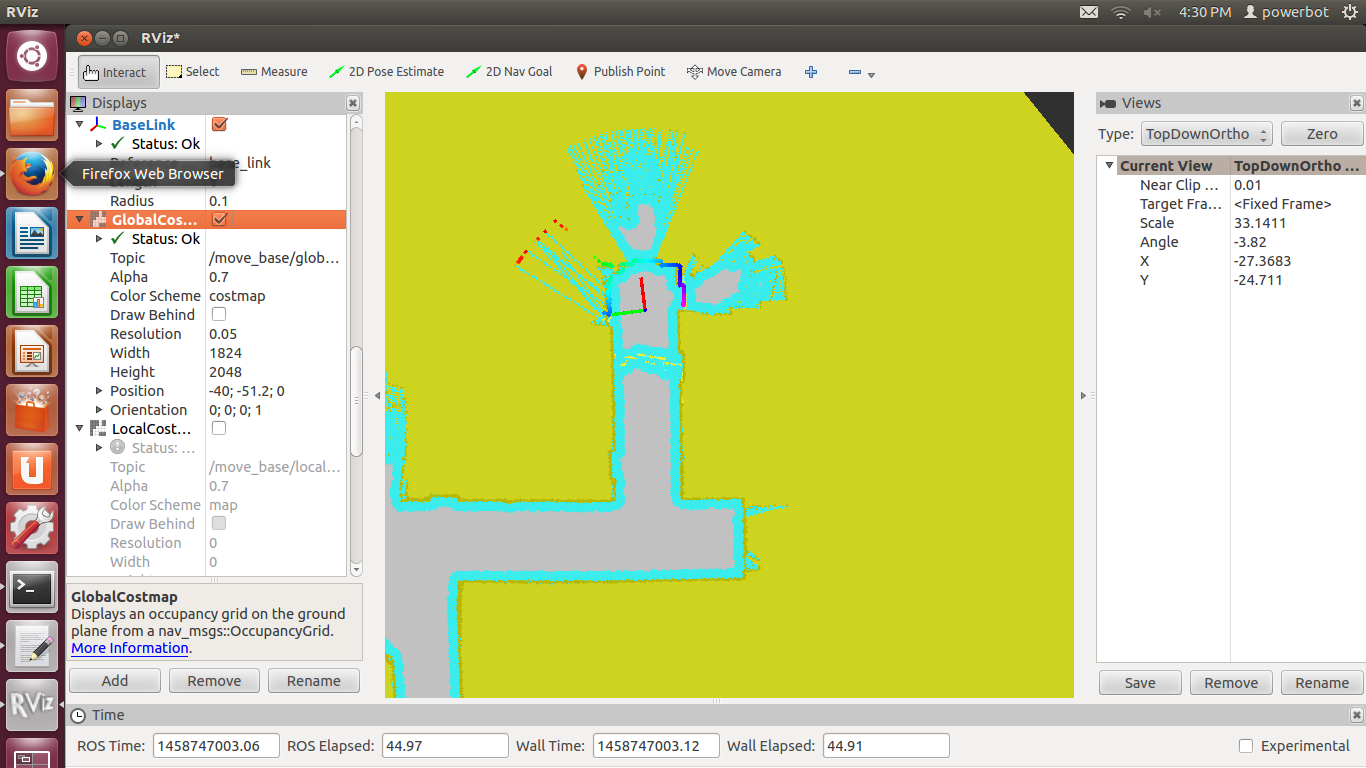
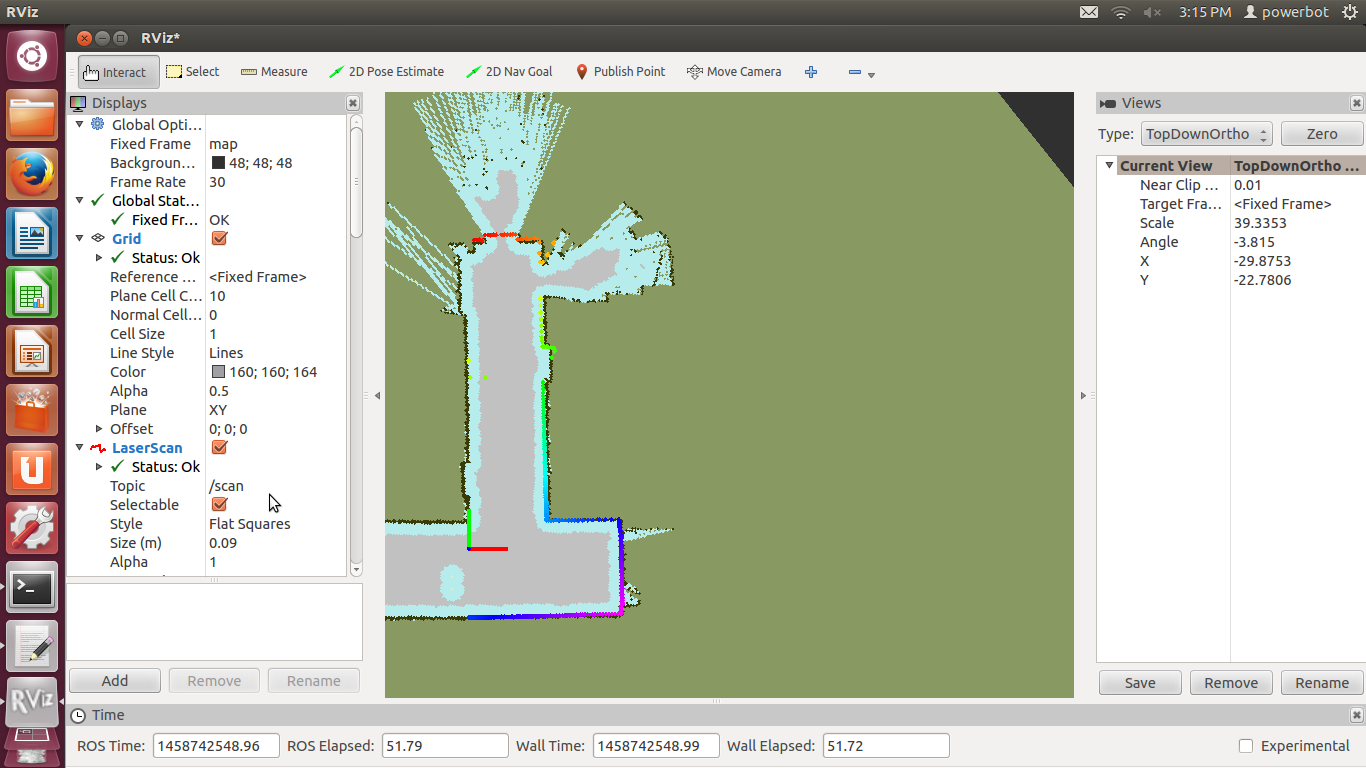
In the two images below, the colour of the global costmap is different: one is bright yellow and the other is a greyish-yellow. Any ideas as to why this happens? Is it something important to navigation? I am thinking that when the global costmap appears greyish-yellow, move-base was not launched correctly. Is this so? I am sorry if this is a silly question!
Thanks for any help.
add a comment
