
Effects of wrong lidar calibration

I am working on calibrating the pose of some lidar relative to base_link frame. After Calibrating x,y and yaw angle of the lidar, I noticed that there is inconsistency in the data showed by the sensor. By increasing the decay time of the laser scans and rotating the robot in place (having a good odometry) this is what I see in Rviz:
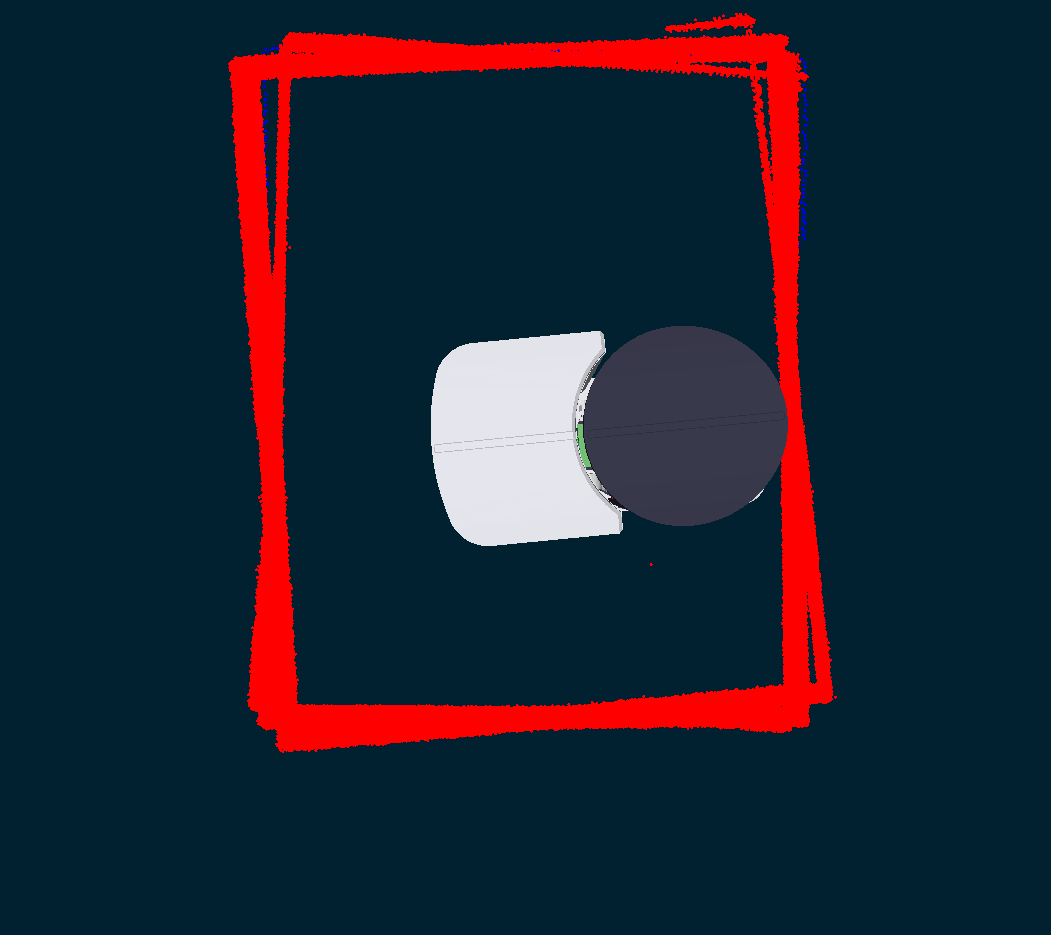
I also compared what the front and back lidar see and this is what I get:

The robot is standing in a nearly rectangular area, what I find weird is that in one corner both laser are well aligned while on the other corner the deviation of the scans is huge.
I am wondering if this effect can be produced by a wrong calibration of x,y,yaw values or that it is the result of a tilted lasers not sharing the same scanning plane (roll and pitch are not equal to zero).

