
nan value after changing inertia matrix [closed]

Hello everybody,
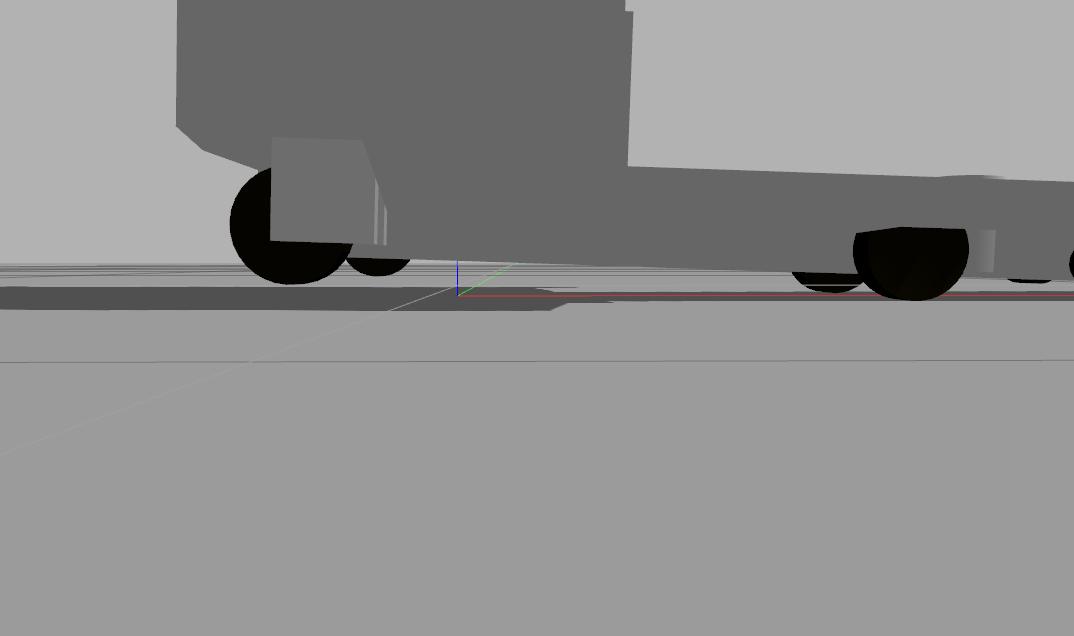
I am the following problem with my robot (rear wheels don't touch the ground):
So I have changed the inertia of my links but I got an error when I change the matrix of some wheels (it's strange because the link in the error message is not linked to the wheels involved in the problem):
[ERROR] [1453136122.044577471, 24.646000000]: Ignoring transform for child_frame_id "fourche" from authority "unknown_publisher" because of a nan value in the transform (-nan -nan -nan) (0.000000 0.000000 0.000000 1.000000)
Urdf description of my wheels (diameter: 125mm, height: 50mm) :
<link name="${prefix}_motor_wheel">
<gazebo>
<self_collide>false</self_collide>
</gazebo>
<visual>
<material name="Yellow">
<color rgba="0.8 0.8 0.0 1.0"/>
</material>
<geometry>
<mesh filename="package://agv/urdf/model/motor_wheel_left.dae"/>
</geometry>
</visual>
<collision>
<geometry>
<mesh filename="package://agv/urdf/model/motor_wheel_left.dae"/>
</geometry>
</collision>
<inertial>
<mass value="1.8"/>
<inertia
ixx="0.0021" ixy="0.0" ixz="0.0"
iyy="0.0035" iyz="0.0"
izz="0.0021"/>
</inertial>
<!--<inertial>
<mass value="1"/>
<inertia
ixx="1.0" ixy="0.0" ixz="0.0"
iyy="1.0" iyz="0.0"
izz="1.0"/>
</inertial>-->
</link>
Thanks in advance
Closed for the following reason
the question is answered, right answer was accepted by
F.Brosseau
close date 2016-01-19 03:26:33.366898
add a comment

