
Ik fast moveIt [closed]
Hi
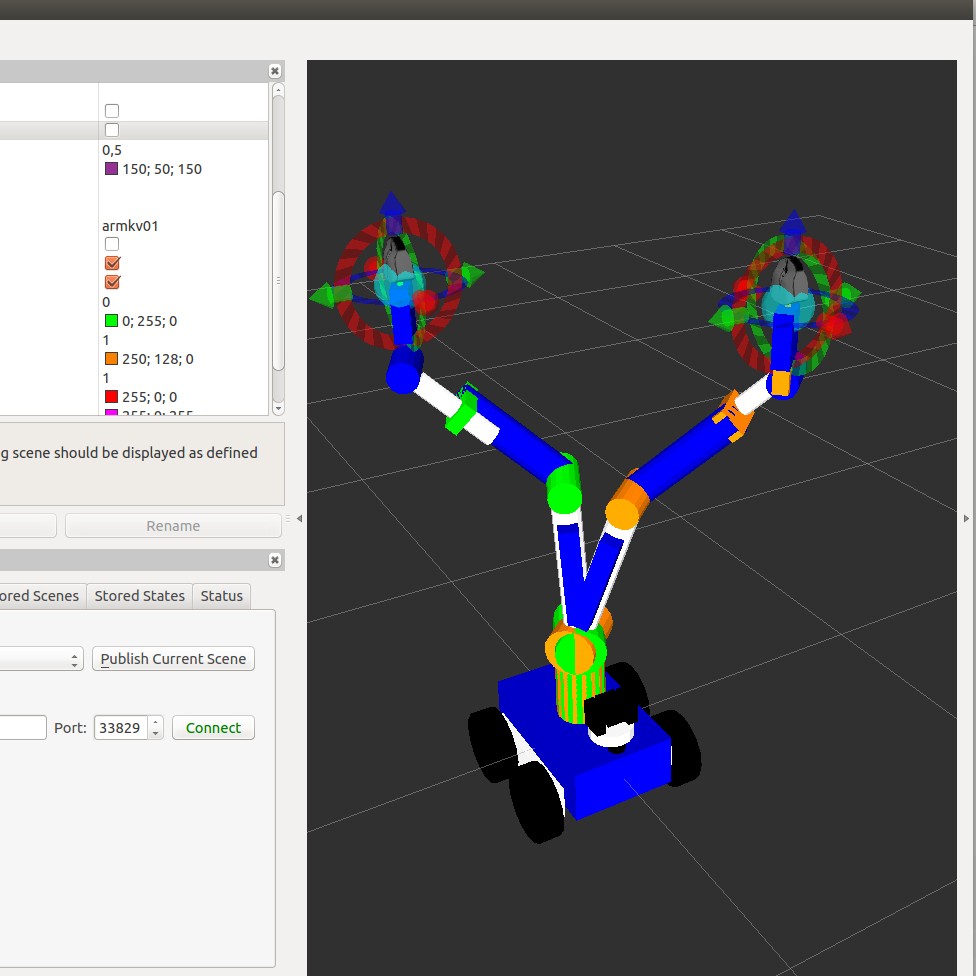
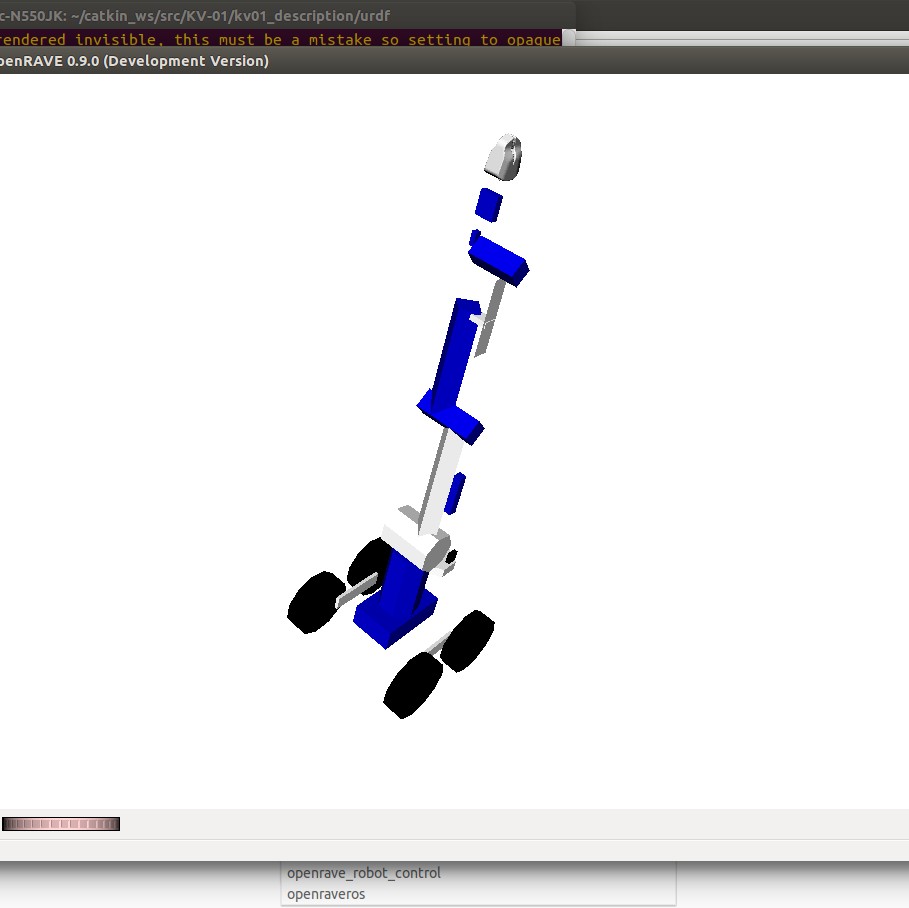
I am creating Ikfast plugin for my robotic manupulator. I am following this tutorial http://docs.ros.org/indigo/api/moveit... . Here is my moveit demo launch everything should be correct. moveit.jpg KDL work fine but I needed to setup smaller resolutions and I am not satisfied with it I used collada to change urdf to dae file. Collada generated dae file without any errors or warnings but wen I openrave name.dae The model looks horrible dae.jpg But it was not problem for me because i wanted just IK c++ file created so I typed
openrave-robot.py kv01.dae --info links
and it wrote correctly
base_link 0
wheel_frame_l 1 base_link
wheel_lp 2 wheel_frame_l
wheel_lz 3 wheel_frame_l
wheel_frame_r 4 base_link
wheel_pp 5 wheel_frame_r
wheel_pz 6 wheel_frame_r
scan 7 base_link
veza 8 scan
camera_l 9 veza
camera_r 10 veza
camera 11 camera_r
model_klb1 12 base_link
model_klb2 13 model_klb1
model_klb3 14 model_klb2
model_klb4 15 model_klb3
model_klb5 16 model_klb4
model_klb6 17 model_klb5
uchopenie_lavo 18 model_klb6
uchopenie_pravo 19 model_klb6
menic5_6 20 model_klb5
link_4_5 21 model_klb4
link_4_5x 22 model_klb4
link_3_4 23 model_klb3
link_2_3 24 model_klb2
menic2_3 25 model_klb2
The informations are correct and my arm is made from Baselink -> model_klb1- model_klb6 so I typed to create cpp file:
python `openrave-config --python-dir`/openravepy/_openravepy_/ikfast.py --robot=kv01.dae --iktype=transform6d --baselink=0 --eelink=17 --savefile=ikfast64_kv01.cpp
I got this error
[plugindatabase.h:929 _SysLoadLibrary] /usr/local/share/openrave-0.9/plugins/openravepy_configurationcache.so: libconfigurationcache.so: cannot open shared object file: No such file or directory
[plugindatabase.h:857 _LoadPlugin] failed to load: /usr/local/share/openrave-0.9/plugins/openravepy_configurationcache.so
[colladareader.cpp:2130 FillGeometryColor] transparecy is 1.000000, which means the item will be rendered invisible, this must be a mistake so setting to opaque (1)
[colladareader.cpp:2130 FillGeometryColor] transparecy is 1.000000, which means the item will be rendered invisible, this must be a mistake so setting to opaque (1)
[colladareader.cpp:2130 FillGeometryColor] transparecy is 1.000000, which means the item will be rendered invisible, this must be a mistake so setting to opaque (1)
/usr/local/lib/python2.7/dist-packages/openravepy/_openravepy_/ikfast.py:1437: RuntimeWarning: invalid value encountered in divide
axisangle /= angle
INFO: moved translation Matrix([[0, 0, 19/100]]) to right end
INFO: moved translation Matrix([[0, 0, -129/500]]) to left end
INFO: moved translation on intersecting axis Matrix([[0, 0, -31/200]]) to left
INFO: [[1, 0, 0, 0],[0, -1, 0, 0],[0, 0, -1, 169/500]]
INFO: [[cos(j6), -sin(j6), 0, 0],[sin(j6), cos(j6), 0, 0],[0, 0, 1, 0]]
INFO: [[1, 0, 0, 0],[0, 0, -1, 0],[0, 1, 0, 0]]
INFO: [[cos(j7), -sin(j7), 0, 0],[sin(j7), cos(j7), 0, 0],[0, 0, 1, 0]]
INFO: [[1, 0, 0, 0],[0, -1, 0, -97/200],[0, 0, -1, 0]]
INFO: [[cos(j8), -sin(j8), 0, 0],[sin(j8), cos(j8), 0, 0],[0, 0, 1, 0]]
INFO: [[1, 0, 0, 0],[0, 0, -1 ...

{kind=link}
{kind=link}
Please add your python-sympy version, also can you link your dae-file (also on the openrave ml)
Just a wild guess: You start with baselink=0 which includes all the wheels in the tree, I don't know how openrave handles this. Try to add a link, e.g. armbase and start from there.
Also openrave is very picky about the openrave version. Try to use the recommended version (0.7.1 for me).
Thanks for answer I already tried to put another link and fixed joint after all wheels and create another fake base but it did not help.