
How to increase the cell size in occupancy grid properly?
Hi,
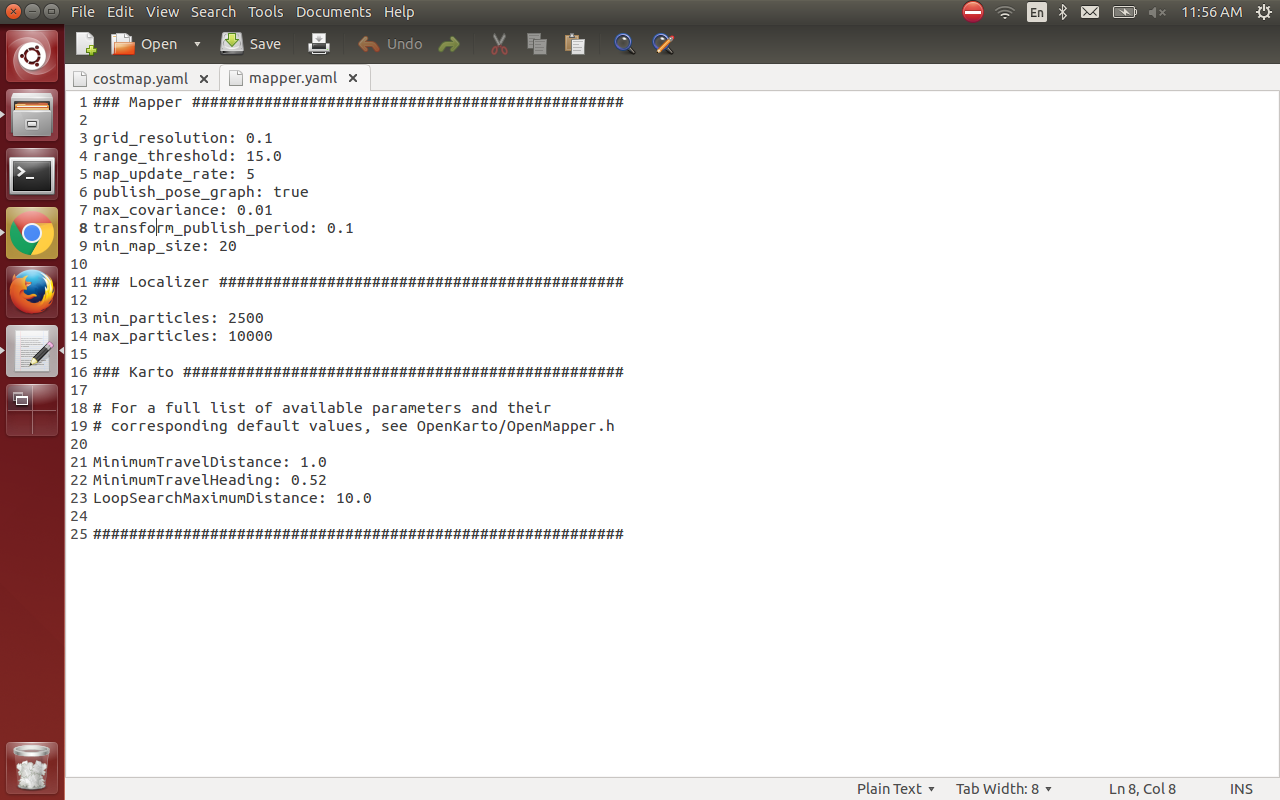
I want to change the cell size in the occupancy grid. I changed the resolution from 0.1 to 0.5. But after this, my exploration algorithm fails at first step only. Any idea why this is happening?
I want to increase the cell size in order to decrease the number of frontiers at each step.
Image of costmap:
Note: I made changes in mapper.yaml not in costmap
add a comment

