
Using move_base for navigation, obstacle cannot be cleared timely
Dear all,
I am using move_base for navigation with a SICK laser scanner. I have set the local cost map update frequency to 30Hz. However, the obstacle cannot be cleared timely when the obstacle such as a walking person moved away. The costmap will not be updated until the robot move.
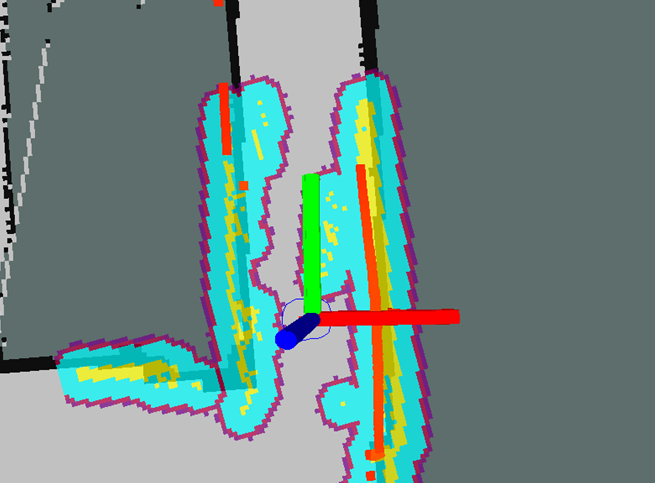
For example, in the attached figure. The walking person in the green axis has moved away, but the costmap cannot clear the obstacle timely. Thus, the robot will be stuck in the virtual corner. The red axis is the robot heading direction.
The parameter settings are:
obstacle_range: 2.5
raytrace_range: 3.0
robot_radius: 0.165
inflation_radius: 0.30
max_obstacle_height: 0.6
min_obstacle_height: 0.0
observation_sources: scan
scan: {sensor_frame: /laser, expected_update_rate: 30, data_type: LaserScan, topic: /scan, marking: true, clearing: true}
global_costmap:
global_frame: /map
robot_base_frame: /base_link
update_frequency: 5.0
publish_frequency: 0.0
rolling_window: false
static_map: true
resolution: 0.05
transform_tolerance: 2.0
map_type: costmap
local_costmap:
global_frame: /odom
robot_base_frame: /base_link
update_frequency: 30.0
publish_frequency: 10.0
static_map: false
rolling_window: true
width: 6.0
height: 6.0
resolution: 0.05
transform_tolerance: 2.0
map_type: costmap
obstacle_layer:
observation_sources: laser_scan_sensor
laser_scan_sensor: {sensor_frame: laser_link, data_type: LaserScan, topic: /scan, marking: true, clearing: true, observation_persistence: 0.0, expected_update_rate: 0.0, max_obstacle_height: 2.0, min_obstacle_height: -2.0, obstacle_range: 4.0, raytrace_range: 5.0, inf_is_valid: false}
max_obstacle_height: 2.0
obstacle_range: 4.0
raytrace_range: 5.0
track_unknown_space: false
move_base parameters:
controller_frequency: 3.0
recovery_behavior_enabled: false
clearing_rotation_allowed: false
TrajectoryPlannerROS:
max_vel_x: 0.5
min_vel_x: 0.03
max_vel_y: 0.0
min_vel_y: 0.0
min_in_place_vel_theta: 0.5
max_vel_theta: 0.25
min_vel_theta: -0.25
escape_vel: -0.1
acc_lim_x: 2.5
acc_lim_y: 0.0
acc_lim_theta: 3.2
holonomic_robot: false
yaw_goal_tolerance: 0.15
xy_goal_tolerance: 0.15
latch_xy_goal_tolerance: false
pdist_scale: 1.2
gdist_scale: 0.6
meter_scoring: true
heading_lookahead: 0.5
heading_scoring: false
heading_scoring_timestep: 0.8
occdist_scale: 0.2
oscillation_reset_dist: 0.05
publish_cost_grid_pc: false
prune_plan: true
sim_time: 1.0
sim_granularity: 0.025
angular_sim_granularity: 0.025
vx_samples: 8
vy_samples: 0
vtheta_samples: 20
dwa: true
simple_attractor: false
Thank you very much, Jack

Can you provide more information like your move_base parameters?
The parameters are posted.