
rviz robot model error

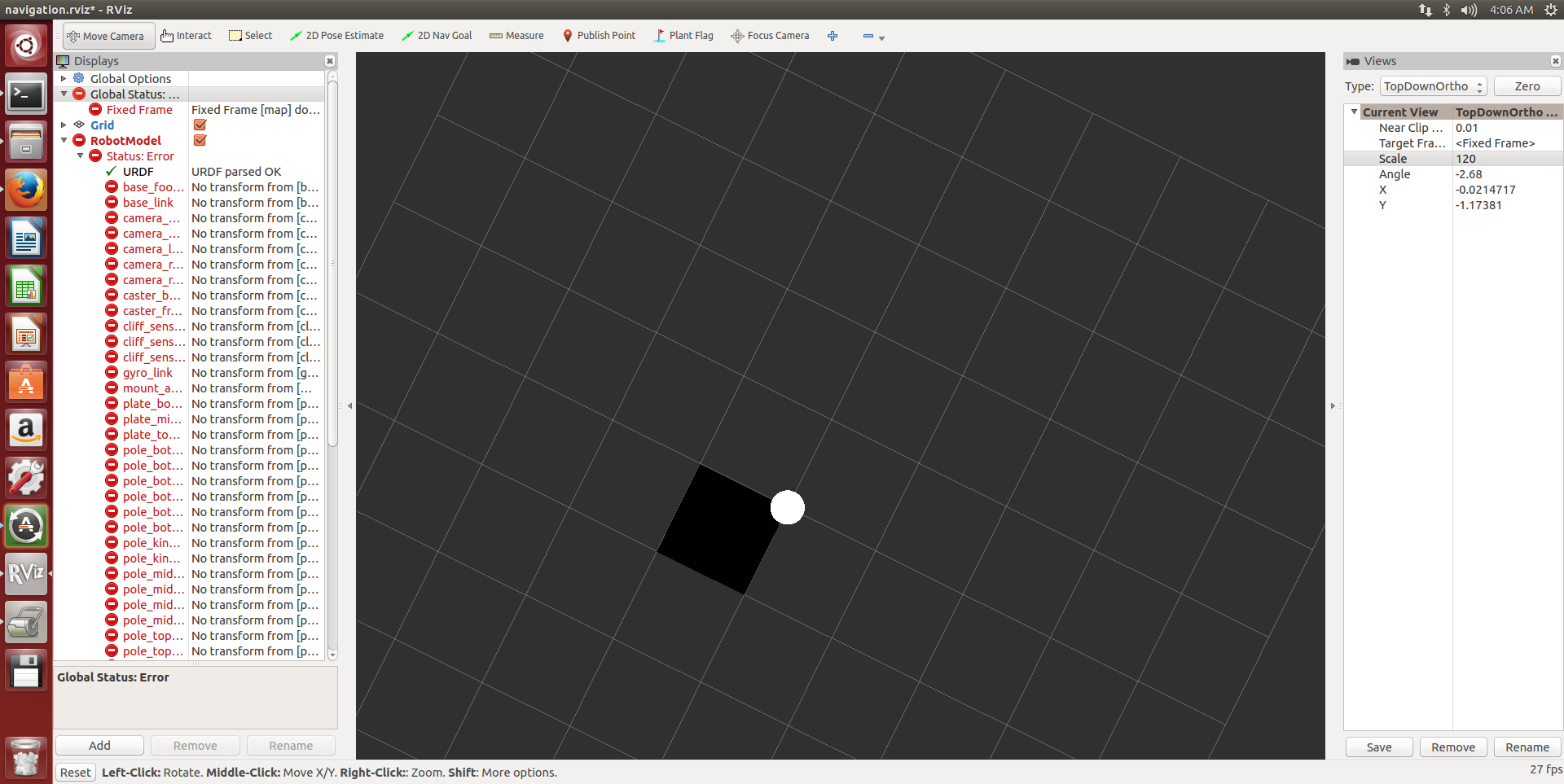
when I run the RVIZ, i have all these error in the left side [ global status( fixed frame ) ] and [ robotModel(status :error..) ] and i'm trying to make a path for the robot to follow it but i can't make the robot move .
I would really appreciate your help
add a comment
