
ekf odom and compass robot_localization
Hi! I have a compass sensor and a odom sensor, this start in the position 0,0,0. The compass it's in the correct position but when i echo the odometry filtered It is delaying it will respect the GPS signal.
Any answer?
EDIT 1:
This is a rosbag with the sensor topics https://www.dropbox.com/s/6kwbd1yaxix...
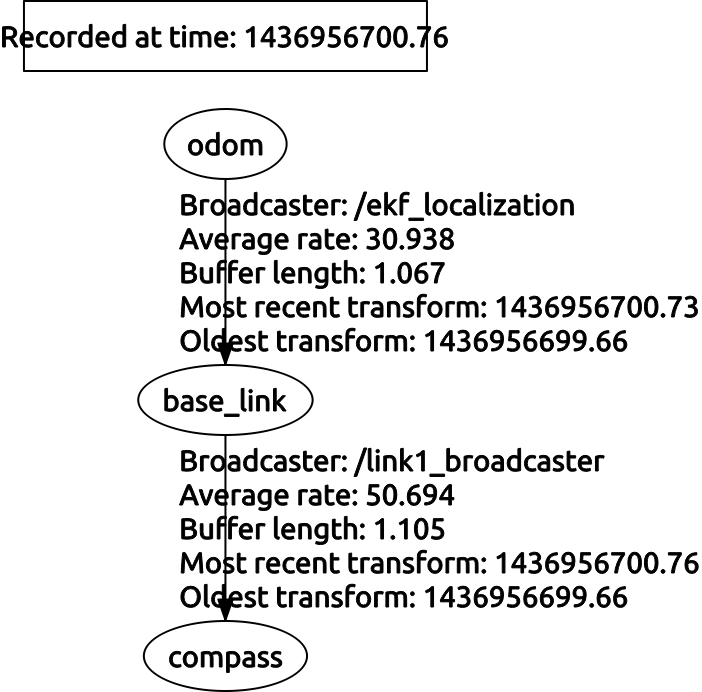
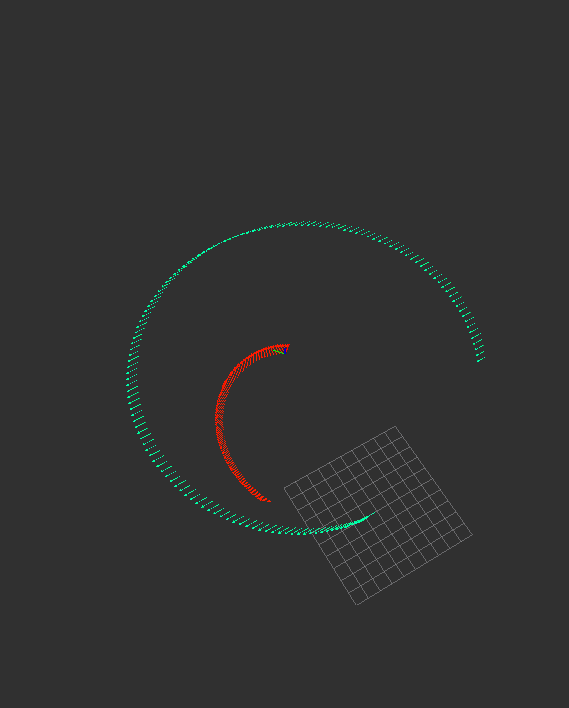
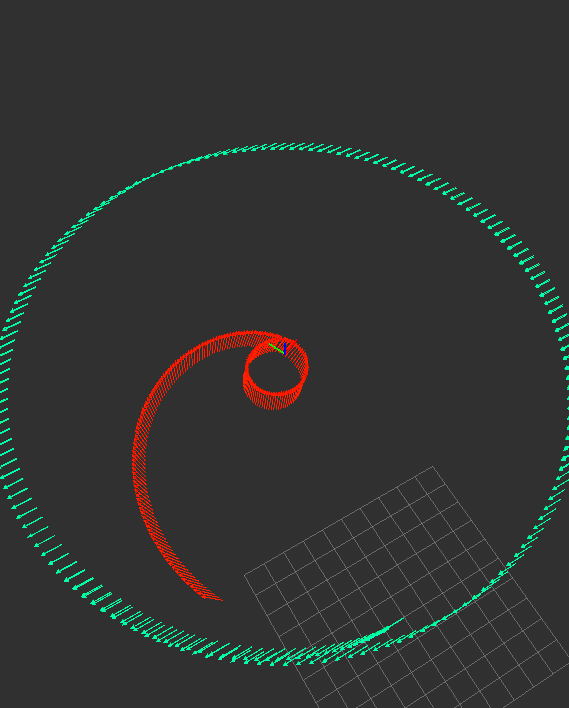
This is a tree graph, nodes graph and rviz capture.

Red color /odometry/filtered and green color position/GPS
The position GPS is in absolute coordinates. The ekf launch is this, with the base link compass transformation:
<!-- EKF -->
<launch>
<node pkg="tf" type="static_transform_publisher" name="link1_broadcaster" args="0.0 0.0 0.0 0.0 0.0
0.0 1.0 base_link compass 20" />
<node pkg="robot_localization" type="ekf_localization_node" name="ekf_localization" clear_params="true">
<param name="frequency" value="30"/>
<param name="sensor_timeout" value="0.1"/>
<param name="two_d_mode" value="true"/>
<param name="map_frame" value="map"/>
<param name="odom_frame" value="odom"/>
<param name="base_link_frame" value="base_link"/>
<param name="world_frame" value="odom"/>
<param name="odom0" value="position/gps"/>
<param name="imu0" value="compass/data"/>
<rosparam param="odom0_config">[true, true, false,
false, false, false,
false, false, false,
false, false, false,
false, false, false]</rosparam>
<rosparam param="imu0_config">[false, false, false,
false, false, true,
false, false, false,
false, false, false,
false, false, false]</rosparam>
<param name="odom0_differential" value="false"/>
<param name="imu0_differential" value="false"/>
<param name="imu0_remove_gravitational_acceleration" value="true"/>
<param name="print_diagnostics" value="false"/>
<!-- ======== ADVANCED PARAMETERS ======== -->
<param name="odom0_queue_size" value="2"/>
<param name="imu0_queue_size" value="10"/>
<param name="debug" value="false"/>
<param name="debug_out_file" value="/home/tmoore/Desktop/debug_ekf_localization.txt"/>
<rosparam param="process_noise_covariance">[0.05, 0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0,
0.0, 0.05, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0,
0.0, 0.0, 0.06, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0,
0.0, 0.0, 0.0, 0.03, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0,
0.0, 0.0, 0.0, 0.0, 0.03, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0,
0.0, 0.0, 0.0, 0.0, 0.0, 0.06, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0,
0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.025, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0,
0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.025, 0.0, 0.0, 0.0, 0 ...
Sorry, to clarify: you have wheel encoder odometry, a magnetometer, and a GPS? Are you using
navsat_transform_node? Perhaps you can give me some more information about your setup.@Porti77 Better post the solution you found as an answer and mark it as an answer so that others can tell the question is solved.