
AMCL Localization, Drifts when turning
Hi people, I am using a differential drive robot with a sick laser scanner.
When I am driving him forwards everything is fine but when I start turning the LaserScan doesnt match with the map and it starts drifting.
I am only using AMCL and not robot_pose_ekf, do I need to use this?
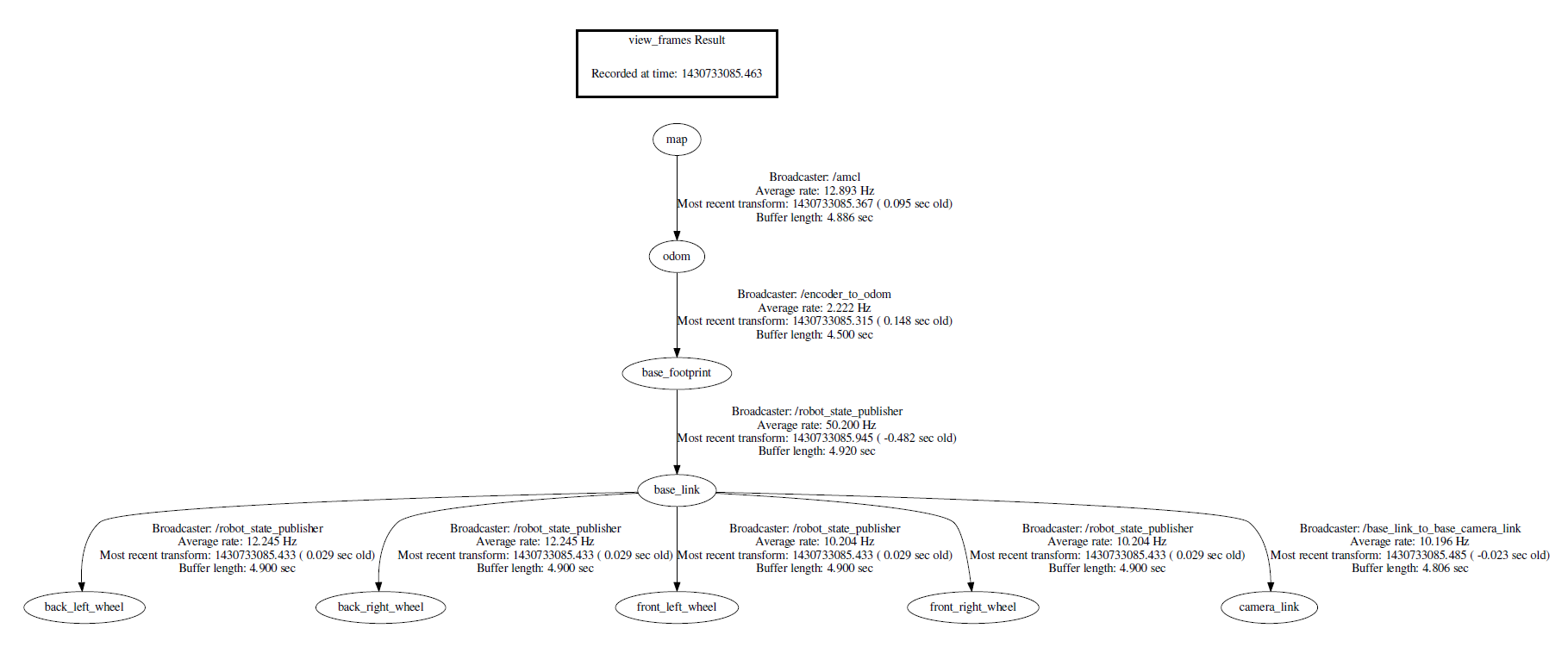
Here is my current tf tree.
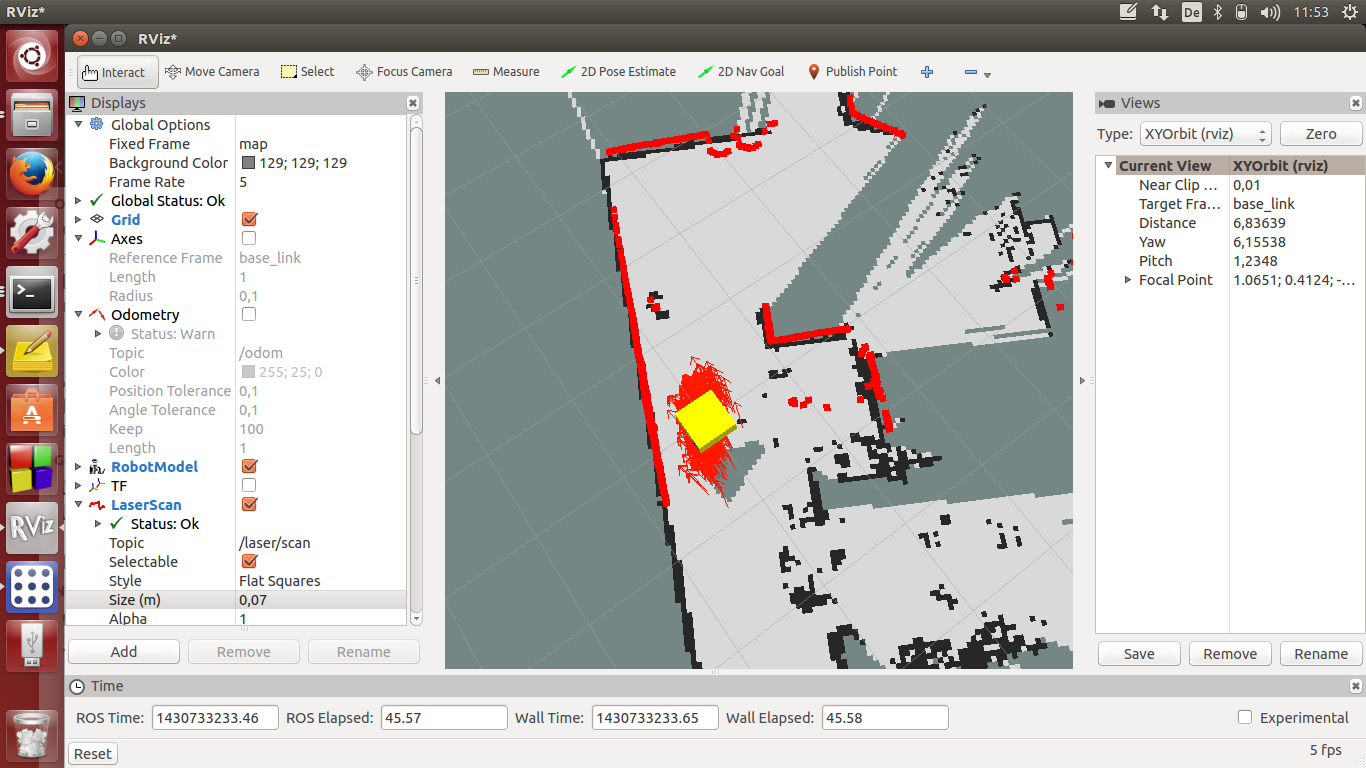
Here is a Screenshot when I drove forwards:
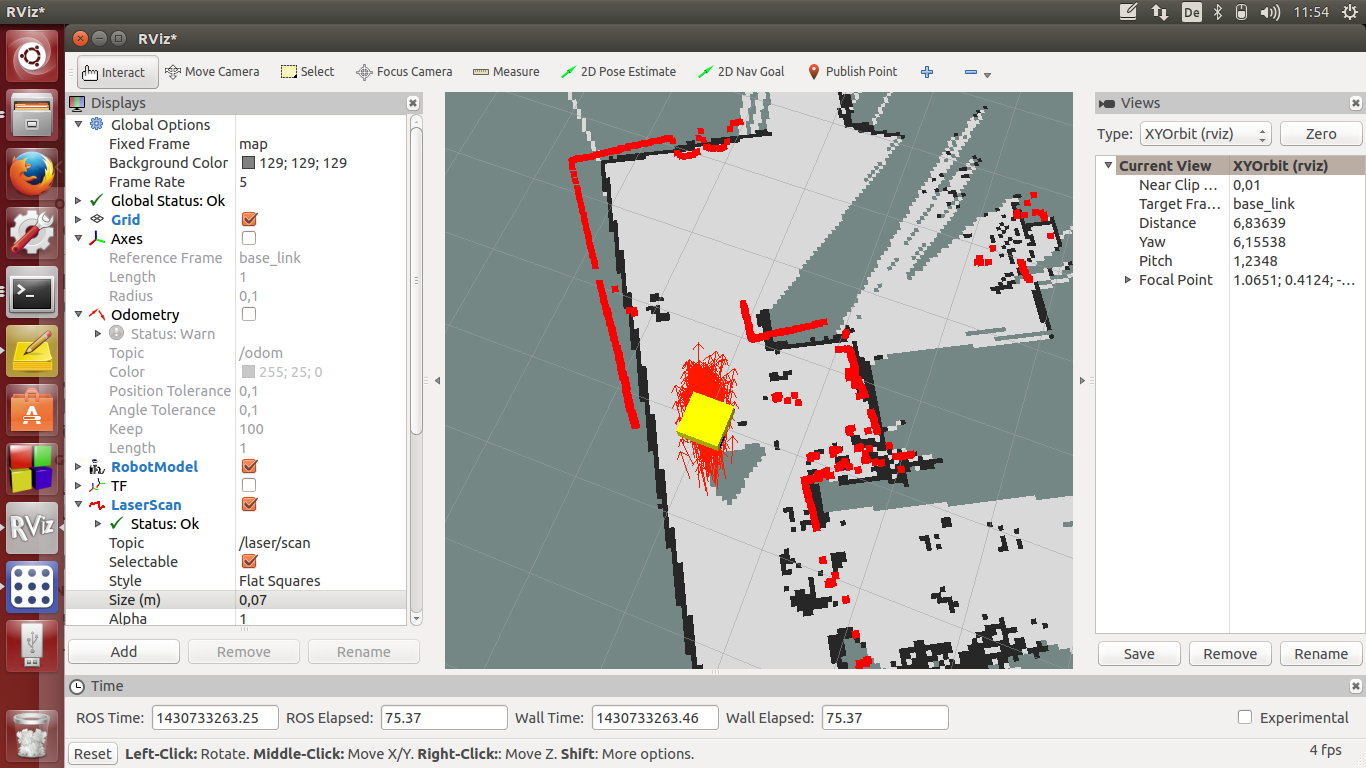
and once I am starting to turn the robot the laserscan (red boxes) dont match with the map anymore :/
I have really no idea where to look for the mistake:
Hope you can help, greeting


I'm having much the same problem, if anyone can help.
Francis G.
Hi, did you find the solution for this problem?