
XTion/Openni2 image flipped
Hi all,
This will be a simple question I'm sure. Currently using XTIon running a openni2_camera_node. This depth and rgb images are coming through fine, but that flipped about the Y axis. Is there something I need to set to correct this?
I am using the command below, with the resulting output. The last be is my modification to the code as it wasn't detecting the resolution on the pi
pi@toeminator ~ $ rosrun openni2_camera openni2_camera_node
[ INFO] [1419945763.946308307]: creating image_transport... this might take a while...
[ERROR] [1419945766.605981936]: Tried to advertise a service that is already advertised in this node [/openni2_camera/set_camera_info]
[ INFO] [1419945766.627862571]: using default calibration URL
[ INFO] [1419945766.641525343]: camera calibration URL: file:///home/pi/.ros/camera_info/rgb.yaml
[ERROR] [1419945766.655618108]: Unable to open camera calibration file [/home/pi/.ros/camera_info/rgb.yaml]
[ WARN] [1419945766.668209898]: Camera calibration file /home/pi/.ros/camera_info/rgb.yaml not found.
[ WARN] [1419945766.678064734]: Using default parameters for RGB camera calibration.
[ INFO] [1419945766.683336646]: using default calibration URL
[ INFO] [1419945766.693109483]: camera calibration URL: file:///home/pi/.ros/camera_info/depth.yaml
[ERROR] [1419945766.701483343]: Unable to open camera calibration file [/home/pi/.ros/camera_info/depth.yaml]
[ WARN] [1419945766.711815171]: Camera calibration file /home/pi/.ros/camera_info/depth.yaml not found.
[ WARN] [1419945766.724518959]: Using default parameters for IR camera calibration.
Warning: USB events thread - failed to set priority. This might cause loss of data...
Available depth modes
0: 320x240, 30 fps, 100 format
1: 320x240, 30 fps, 101 format
2: 320x240, 60 fps, 100 format
3: 320x240, 60 fps, 101 format
4: 640x480, 30 fps, 100 format
5: 640x480, 30 fps, 101 format
6: 160x120, 30 fps, 100 format
7: 160x120, 30 fps, 101 format
[ INFO] [1419945768.719023684]: Everything set up... lets stream some images
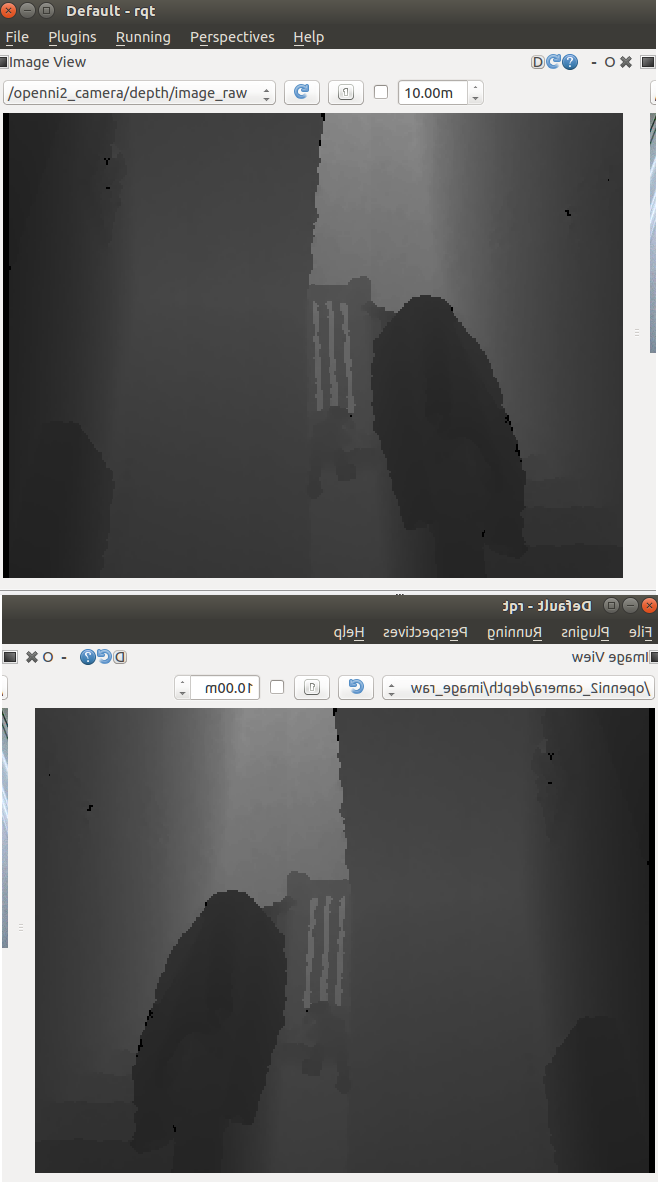
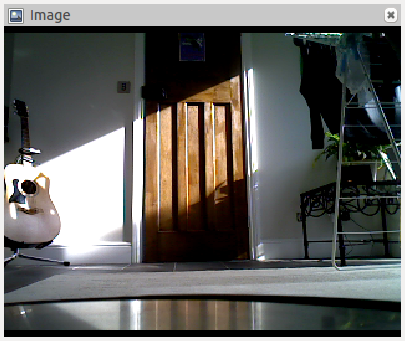
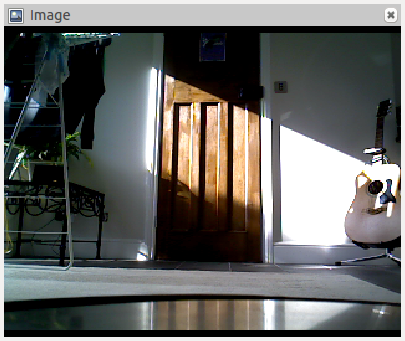
The images below show the image streamed back as viewed in rqt (top) and bottom is how the scene really looks (I've flipped is manually)
Many Thanks
Mark

Please clarify what you mean by flipped and which axis you are referring to.
It's flipped about the Y axis as you look at it. i.e. the left is on the right and the right is on the left. The image is the correct re top and bottom
Please explain yoiur full setup so we can reproduce it? What are you running with what parameters? What visualizer are you running with what settings? Commands and console outputs are useful. A screen capture would be helpful as well.
Please see guidelines for asking questions at: http://wiki.ros.org/Support