
How can I get the positions data of every joint ?

Hi everyone,
I am doing arm trajectory planning.
Now I am using motion_planning_rviz_plugin to display the trajectory of the arm. First I wrote program reference to link text and then RVIZ subscribe the topic "joint_path_display".
I can display the trajectory just like the picture 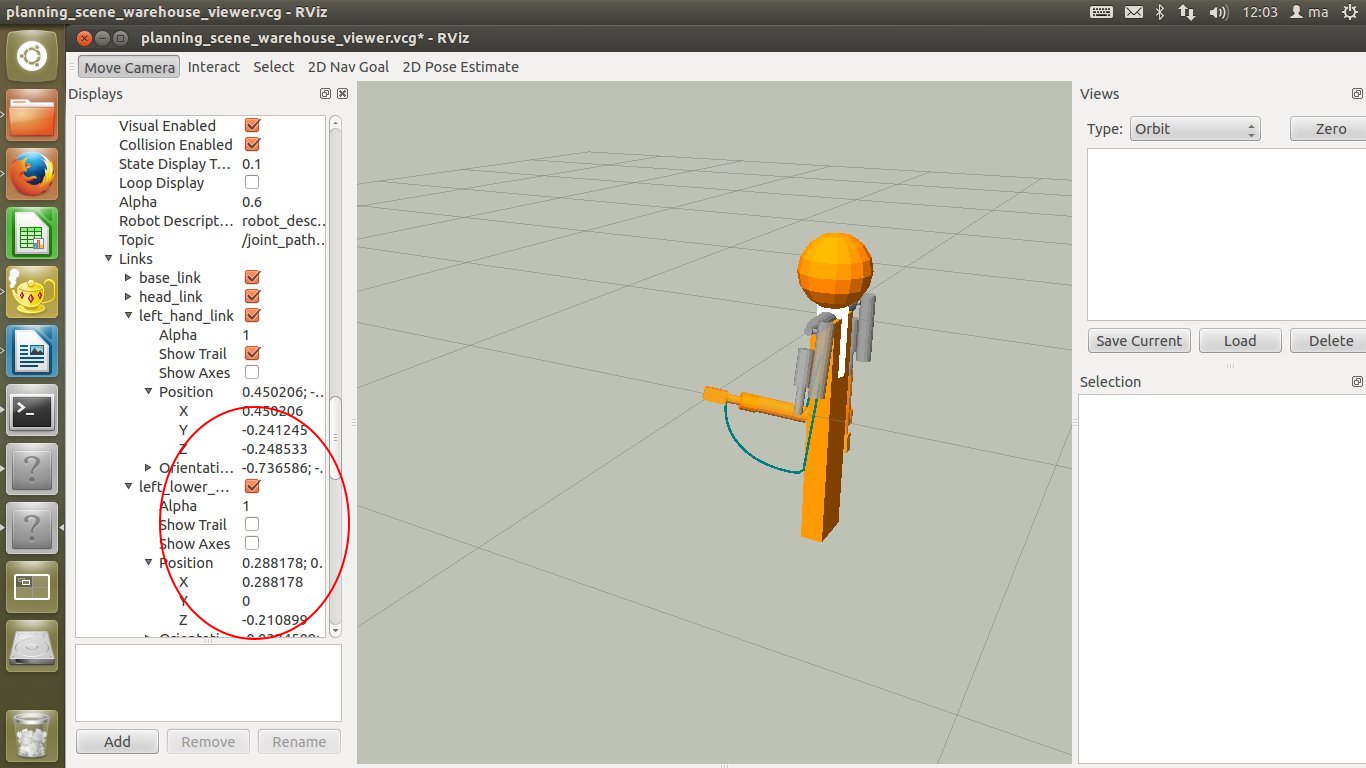 !
Now I want to get the position data of every joints which I circled with red colour on the image.
How can I get the position information of every joint?
!
Now I want to get the position data of every joints which I circled with red colour on the image.
How can I get the position information of every joint?
Thanks in advance
add a comment

