
Dynamically assigning covariance values to Odometry node [closed]

So I am working on using robot_pose_ekf as my only source of localization. Gmapping unfortunately is not applicable to my scenario since it only localizes the robot when there is scan data (meaning objects in your laser range). My odometry has a pretty big drift. If I drive straight with a joystick, my odom says i am 2 meters left of where i should be, where i traveled 10 meters forward from my starting point.
Obviously this is not my most accurate sensor input into robot pose ekf, so my covariance values should be higher then sensors which i believe are more accurate. Now my question is, I know you can statically assign covariance values in your odometry node to something like 0.1 0.001, but how do I go about assigning the covariance values with dynamic variances? How do I calculate the equations to know what the covariance is, over a certain time. From my understanding, the longer the robot travels, the higher the covariance should be for my odometry since the drift becomes greater and greater.
I know the gps_common package that converts the gps /fix to a odometry message is dynamically assinging its covariances like this. But I have no idea how to do that myself.
My second question would be, if lets say the robot has traveled 100 meters and the covariance values are really great, I would assume that my wheel odometry sensor would at a certain point just become obsolete because the differences in pose is so great (say gps pose vs odom pose), as well as the variance would practically be minimally considered by robot pose ekf when trying to filter all the data). Is there a way to make odometry a more reliable sensor source after a certain period of time? (i.e make covariance value go from 5.0 to .1 again just like it was in the beggining). I know Tom Moore said he would respond to this question, but other suggestions are appreciated as well.
EDIT: Currently my covariance values are:
[0] = 0.1;
[7] = 0.1;
[14] = 1000000000000.0;
[21] = 1000000000000.0;
[28] = 1000000000000.0;
[35] = 0.01;
But the odom_combined tf frame from ekf is still really pretty far off.
Here is the bag played with my odom data (left) and gps data (right) (i inverted the axis for visuals)
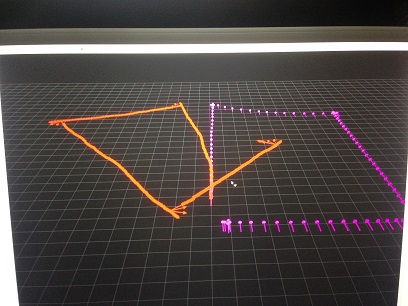
So how can i calculate what my static covariance value should be from this?


