
[Hydro] Error in move_base.launch rviz

I succed finally to launch my move_base.launch file. And when with rviz I tried to tell where the robot is in the map, with the 2d Pose Estime, i got this message :
Failed to transform initial pose in time (Lookup would require extrapolation into the future. Requested time 1407222627.317546291 but the latest data is at time 1407222627.301636934, when looking up transform from frame [map] to frame [base_link])
I think that there is a link with my previous problem http://answers.ros.org/question/18796...
This is my view_frames
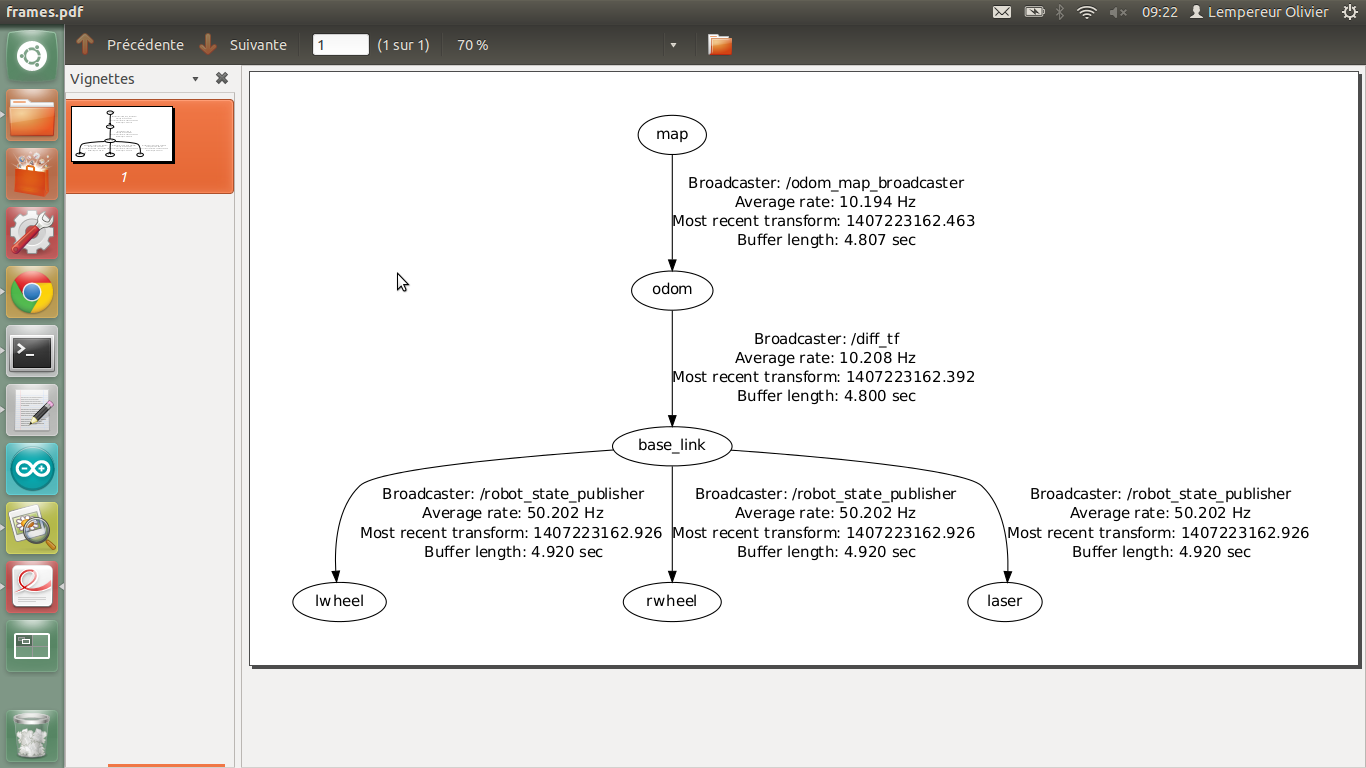
My local costmap is :
local_costmap:
global_frame: /odom
robot_base_frame: base_link
update_frequency: 5.0
publish_frequency: 2.0
static_map: false
rolling_window: true
width: 6.0
height: 6.0
resolution: 0.05
My global costmap is global_costmap: global_frame: /map robot_base_frame: base_link update_frequency: 5.0 static_map: true
The link beetween map and /odom is done in the move_base.launch file :
<node pkg="tf" type="static_transform_publisher" name="odom_map_broadcaster" args="0 0 0 0 0 0 /map /odom 100" />
When I launched roswtf i got this error
Loaded plugin tf.tfwtf
No package or stack in context
================================================================================
Static checks summary:
No errors or warnings
================================================================================
Beginning tests of your ROS graph. These may take awhile...
analyzing graph...
... done analyzing graph
running graph rules...
... done running graph rules
running tf checks, this will take a second...
... tf checks complete
Online checks summary:
Found 3 warning(s).
Warnings are things that may be just fine, but are sometimes at fault
WARNING The following node subscriptions are unconnected:
* /amcl:
* /tf_static
* /clock
* /initialpose
* /scan
* /robot_state_publisher:
* /joint_states
* /rpid_velocity:
* /rwheel
* /diff_tf:
* /lwheel
* /rwheel
* /map_server:
* /clock
* /odom_map_broadcaster:
* /clock
* /move_base:
* /move_base_simple/goal
* /tf_static
* /clock
* /lpid_velocity:
* /lwheel
WARNING These nodes have died:
* mark2_arduino-2
WARNING Received out-of-date/future transforms:
* receiving transform from [/robot_state_publisher] that differed from ROS time by 1407396264.96s
* receiving transform from [/diff_tf] that differed from ROS time by 1407396264.45s
Found 1 error(s).
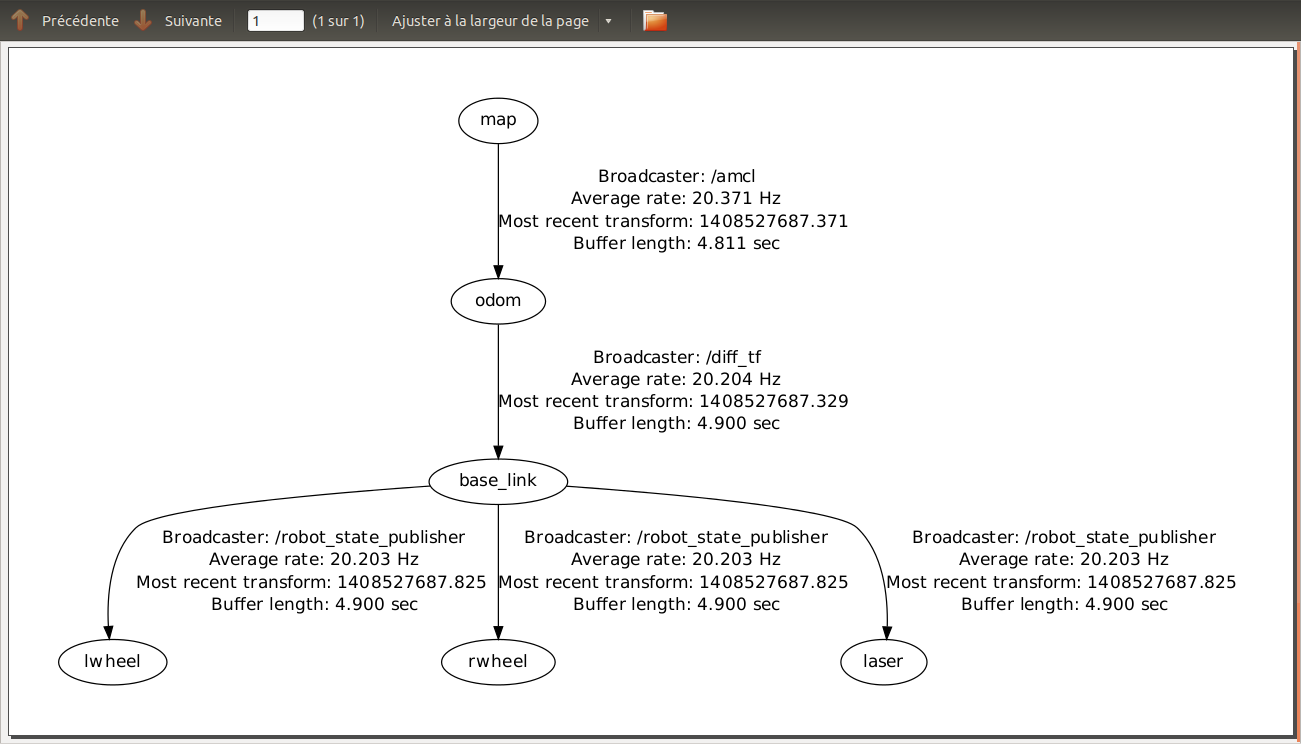
Update The new tf view_frames




1) are you by chance using your system clock to set time stamps to any of your transform messages? Your computers system clock isn't same as ros::time since ros time starts from the year 1970. That could be one explanation for the huge time difference it is telling you you are having.
2) I know you said you are building your own map when I asked if you are using bagged data, but are you sure your not just using recorded wheel odometry and scan data? And building your own map off of replaying that bag file?
Whether you are using bag data or not, try setting the use_sim_time parameter to true for your mapping node. This will use the ros simulation time rather then whatever time you are currently using. If that still doesn't work, send me a e-mail and we will figure out things from there.
Sorry it doesn't work
email me and i will help you figure this out. krgebis AT gmail DOT com
Setting use_sim_time on a real robot WILL mess things up.
No sorry, even without use_sim_time, i have the very same error